儔僘儀儕乕僷僀俀
俥倰倕倕俛俽俢
帺戭僒乕僶傪儔僘儀儕乕僷僀係偱嶌傞偨傔丄
梋偭偨儔僘儀儕乕僷僀俀偱
俬俷俿乮嶪係擫乯傪嶌傝傑偡丅
偦偺俁
俀侽俀俀擭
侾侽寧侾俈擔
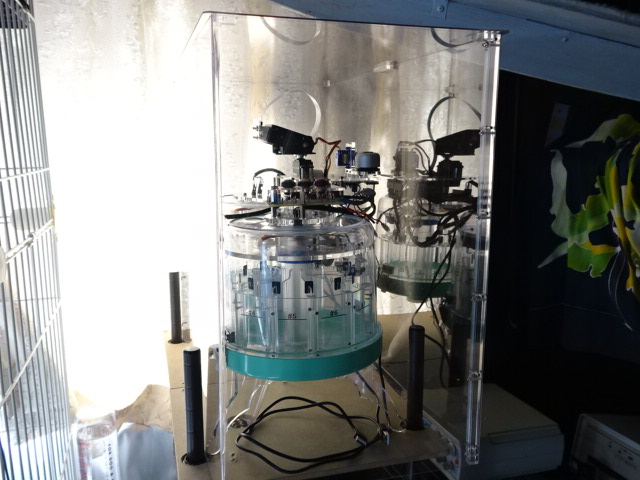
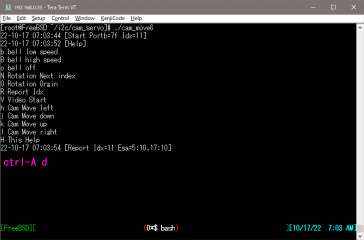
侾擔俀夞偺巜掕帪娫偑棃偨傜帺摦偱塧傗傝傪峴偄傑偡丅僇儊儔偺堏摦傗庤摦偺塧傗傝偲摨偠僾儘僌儔儉撪偱峴偄傑偡丅奜晹偐傜俽俽俫偱傾僋僙僗偡傞偺偱丄僾儘僌儔儉偼忢挀偝偣偰偍偔昁梫偑偁傝丄嵞愙懕偱偒傞傛偆偵倱們倰倕倕値傪巊偄傑偡丅晛捠倱們倰倕倕値偺巊偄曽偼壓偺傛偆側俠倀俬偺儅儖僠僂僀儞僪僂壔偱偡偑丄倱們倰倕倕値傪巊偆偲俽俽俫偐傜儘僌傾僂僩偟偰傕僾儘僙僗傪婲摦偟偨傑傑偵偡傞偙偲偑偱偒傑偡丅
壓偺傛偆偵倱們倰倕倕値撪偱惂屼僾儘僌儔儉傪婲摦偟傑偡丅偦偺屻丄們倲倰倢亅俙 倓偱僙僢僔儑儞傪堦帪愗抐偟傑偡丅偦偺屻偼俽俽俫傪廔椆偟偰傕惂屼僾儘僌儔儉偼廔椆偣偢偵忢挀偟傑偡丅
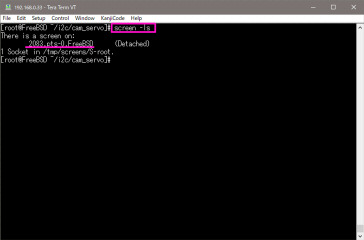
俽俽俫偱嵞搙儘僌僀儞屻丄僙僢僔儑儞斣崋傪妋擣偟偰嵞愙懕偟傑偡丅壓偺椺偱偼俀侽俉俁側偺偱丄倱們倰倕倕値 亅倰 俀侽俉俁偲偟傑偡丅
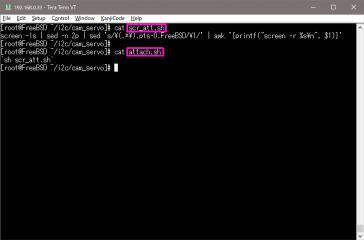
僙僢僔儑儞斣崋傪妋擣偟偰擖椡偡傞偺偼柺搢側偺偱丄僗僋儕僾僩傪嶌惉偟傑偟偨丅倎倲倲倎們倛丏倱倛偩偗偱惂屼僾儘僌儔儉偵嵞愙懕偱偒傑偡丅
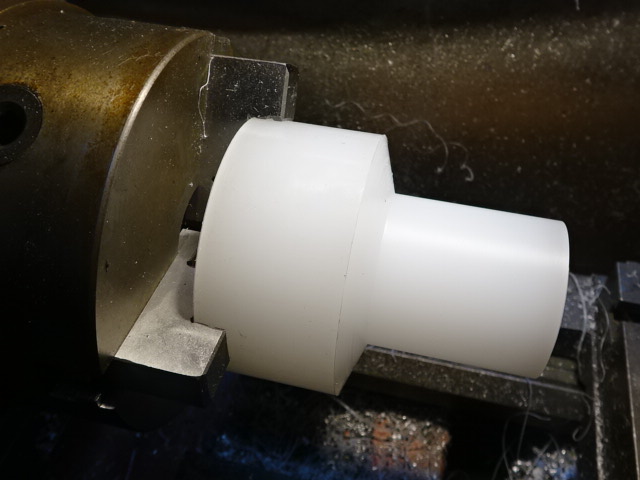
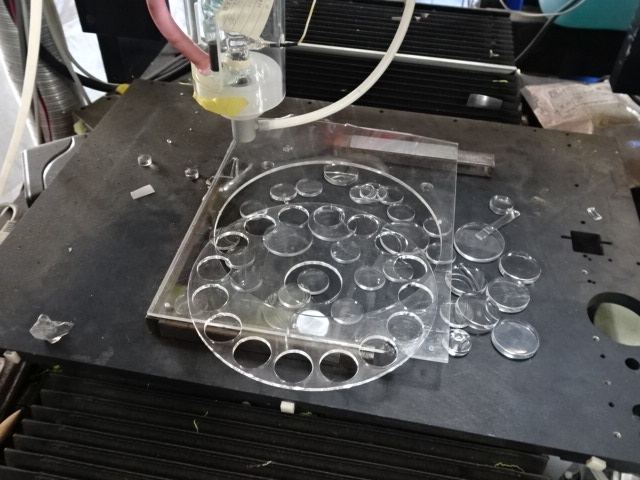
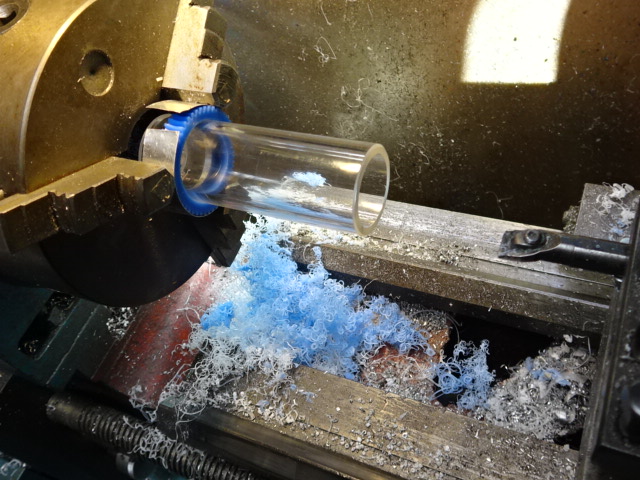
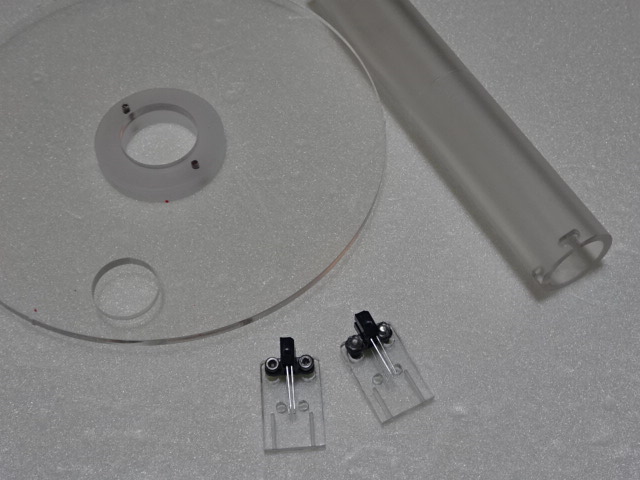
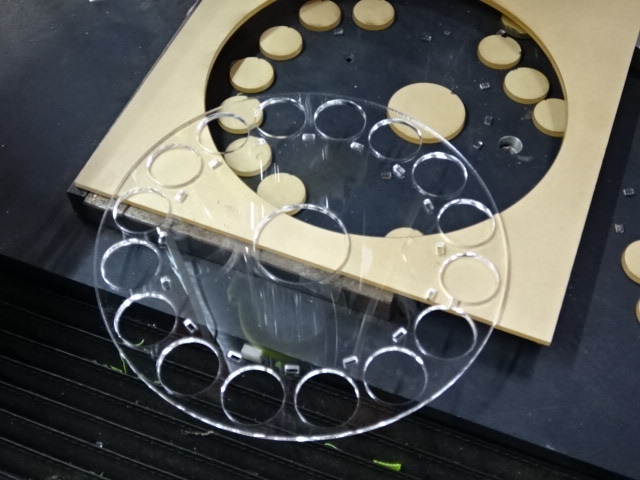
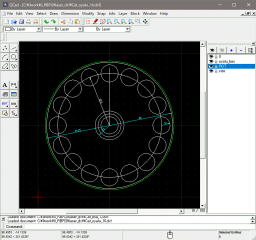
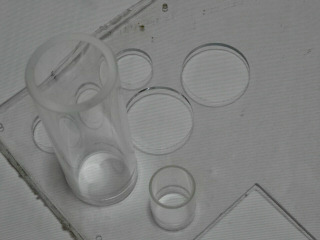
偍傗偮偺曽傕嶌惢奐巒偟傑偡丅屌掕僙儞僞偺奜宎傪彮偟嶍偭偰夞揮僙儞僞偑浧傞傛偆偵偟傑偡丅摨偠撪宎丄奜宎偺傾僋儕儖僷僀僾傪慻傒崌傢偣偰傕丄偦偺傑傑偱偼浧傜側偄偱偡丅崱夞偺応崌偼奜宎係侽倣倣岤傒俀倣倣乮撪宎俁俀倣倣乯偺夞揮僙儞僞偲奜宎俁俀倣倣岤傒俀倣倣偺屌掕僙儞僞偱偡丅

億儕僾儘僺儗儞朹偐傜屌掕僙儞僞偺儂儖僟傪嶌傝傑偡丅奜宎俇侽倣倣傑偱嶍傝傑偡丅愗傝巕偑偨偔偝傫弌傑偡丅


僙儞僞寠傪奐偗偰丄屌掕僙儞僞偑擖傞傛偆偵拞偖傝偟傑偡丅

挌搙丄擖傝傑偟偨丅

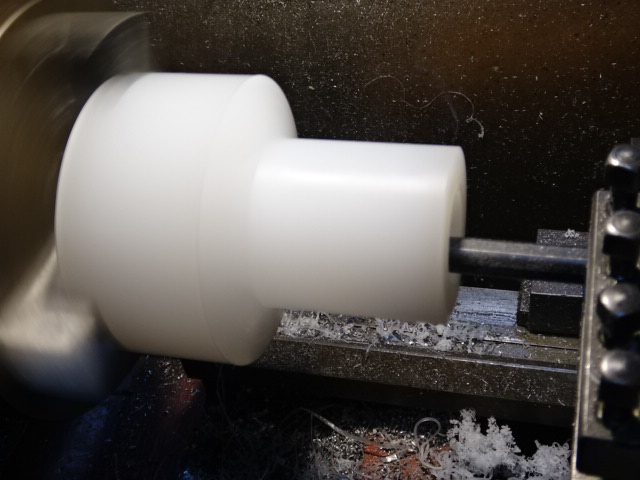
偍傗偮偼塧偺検偑彮側偄偺偱丄傾僋儕儖僷僀僾傪侾俇杮暲傋偰侾俆夞暘偍傗偮偑弌偣傞傛偆偵偟傑偡丅撪宎偼俀侽倣倣丄挿偝偼俉係們倣偱偡丅庤帩偪偼侾倣暘偟偐側偄偺偱懌傝傑偣傫丅捛壛峸擖偟偰偍偒傑偡丅
侾侽寧侾俉擔
偍傗偮梡偺儀乕僗斅傪俆倣倣偺傾僋儕儖偐傜嶌惢偟傑偟偨丅

懕偄偰丄億儕僾儘僺儗儞朹偱偍傗偮梡偺屌掕僙儞僞偺儂儖僟俁庬傪慁斦偱嶌惢偟傑偟偨丅

侾侽寧侾俋擔
娛僐乕僸偱嶌偭偨塧梡攔弌岥偼塧偺庬椶偵傛偭偰搑拞偱媗傑偭偰偟傑偆偙偲偑偁傝丄尨場偼媫偵岥宎偑彫偝偔側傞宍忬偵偁傝偦偆偱偡丅僗僩乕儗乕僩側宍偺侾侽侽嬒偺僗僾儗乕儃僩儖偺忋壓傪愗傝庢偭偨暔偵曄峏偟傑偟偨丅壗夞偐幚尡傪偟偰媗傑傜側偄偙偲傪妋擣偟傑偡丅

侾侽寧俀俁擔
偍傗偮梡偺屌掕僙儞僞傪儂儖僟傪巊偭偰働乕僗偵屌掕偟傑偟偨丅

侾侽寧俀係擔
塧傗傝晹偺儔儞僯儞僌僥僗僩傪峴偭偰偄傑偡偑丄壒偑偟偨傝丄僇儊儔偑摦偔偺偱偠傖傟偰嚙傒偮偒傑偡丅朞偒傟偽巭傔傞偐傕偟傟傑偣傫偑丄僇僶乕偱暍偆側偳懳嶔偑昁梫偱偡丅
侾侽寧俀俆擔
偍傗偮梡偺晹昳傪儗乕僓壛岺偱嶌惢偟傑偟偨丅

侾侽寧俀俇擔
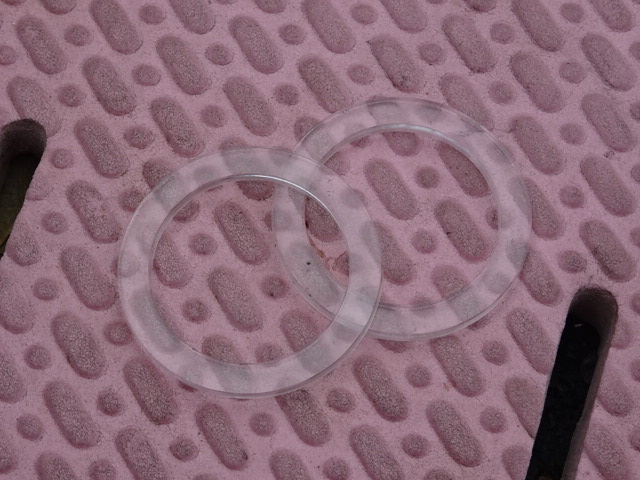
偍傗偮梡偺夞揮僙儞僞偲偍傗偮擖傟偺僷僀僾偺捈宎傪俁倣倣岤偺傾僋儕儖斅偱帋偟愗傝偟傑偡丅儗乕僓壛岺偟偨帪偺挌搙偄偄捈宎傪妋擣偟傑偡丅
忋婰偱妋擣偟偨捈宎偱恾柺傪嶌惉偟丄俁倣倣岤偺傾僋儕儖斅偐傜夞揮僙儞僞偵庢傝晅偗傞曐帩斅傪愗傝弌偟傑偟偨丅

曐帩斅偵夞揮僙儞僞偲偍傗偮擖傟偺奜宎俀係倣倣偺僷僀僾傪壖巭傔偟傑偡丅挌搙椙偄寠壛岺偑偱偒傑偟偨丅

侾侽寧俀俈擔
偍傗偮擖傟偺傾僋儕儖僷僀僾傪挿偝俈俁倣倣偱愗傝弌偟偰曐帩斅偵壖巭傔偟傑偟偨丅傑偨丄僒乕儃儌乕僞梡偺屌掕僗僥乕傕愗傝弌偟傑偟偨丅偍傗偮擖傟偼侾俇杮昁梫偱偡偑丄侾倣偱偼懌傜側偄偨傔丄捛壛敪拲偟偰偍偒傑偟偨丅

夞揮僙儞僞偵屌掕偱偒傞傛偆偵僂僅乕儉儂僀乕儖傪係侽倣倣偵拞偖傝偟傑偡丅夞揮僙儞僞偑挌搙擖傞傛偆偵壛岺偱偒傑偟偨丅

僒乕儃儌乕僞偵俇倣倣偺僔儍僼僩傪愙懕偡傞傾僟僾僞傪俀侽倣倣偺傾儖儈朹偐傜嶌惢偟偰丄僂僅乕儉僊傾傪壖巭傔偟傑偟偨丅

僼僅僩僀儞僞儔僾僞傪庢傝晅偗傞屌掕僗僥乕偺恾柺傪嶌惉偟傑偡丅
僼僅僩僀儞僞儔僾僞偺屌掕僗僥乕傪俀屄愗傝弌偟傑偟偨丅

侾侽寧俀俋擔
偍傗偮梡偺壛岺丄僼僅僩僀儞僞儔僾僞偺僗僥乕傪嶌惢偟傑偟偨丅

夞揮僒乕儃偺廃曈傕嶌惢偟傑偡丅

偍傗偮梡偺儂乕僗傕捛壛偱峸擖偟傑偟偨丅

侾侽寧俁侽擔
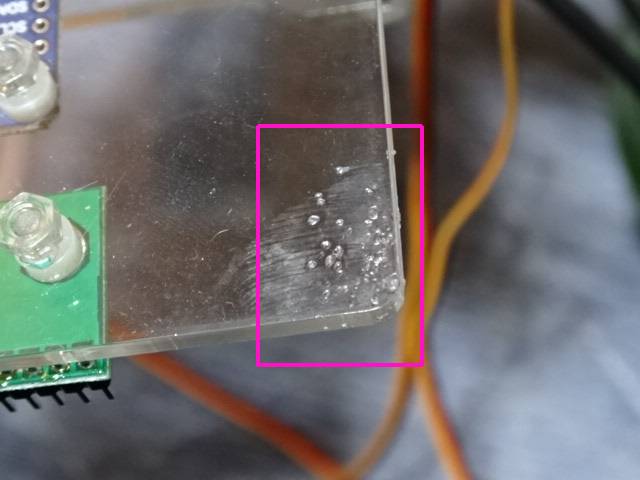
偍傗偮梡偺撪宎俀侽倣倣偺傾僋儕儖僷僀僾偲俁倣倣斅偑摓拝偟傑偟偨丅偙傟傑偱俁倣倣偲俆倣倣偺斅嵽偼攑婞昳傪巊偭偰棃傑偟偨偑丄偙偙偵棃偰柍偔側傝傑偟偨丅
曐岇僔乕僩偑晅偄偨忬懺偱忋懁偺僾儗乕僩偺儗乕僓壛岺偺摦夋傪嶣傝傑偟偨丅僋儕僢僋偡傞偲栺俀俁MB偺倣倫係傪僟僂儞儘乕僪偟傑偡丅
曐岇僔乕僩傪攳偑偟偰丄忋懁僾儗乕僩偺姰惉偱偡丅曐岇僔乕僩傪晅偗偨傑傑愗傞偲抐柺偑峳傟傑偡丅

偍傗偮梡偺僼僅僩僀儞僞儔僾僞偺幷暳斅傪侾俈枃愗傝弌偟傑偟偨丅夞揮晹傪壖慻偟偰傒偟偰寠宎傪妋擣偟傑偡丅寠宎偼挌搙椙偄偄偱偡丅

侾侾寧侾擔
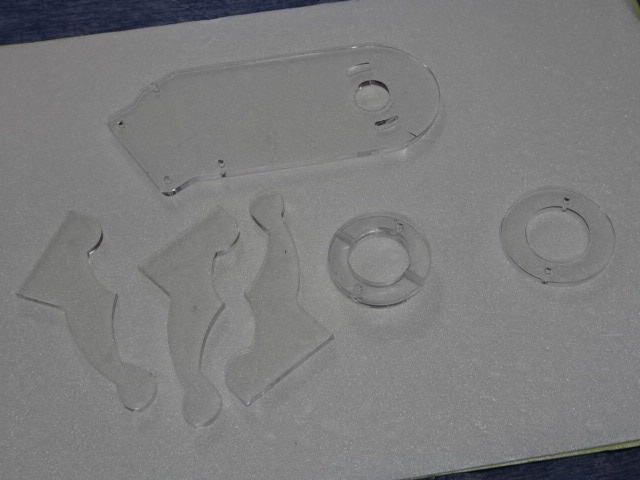
峸擖偟偨傾僋儕儖僷僀僾傪慁斦偱愗傝丄巆傝偺偍傗偮擖傟傪嶌惢偟傑偟偨丅

忋壓偺僾儗乕僩梡偺屌掕儕儞僌傕嶌惢偟傑偟偨丅

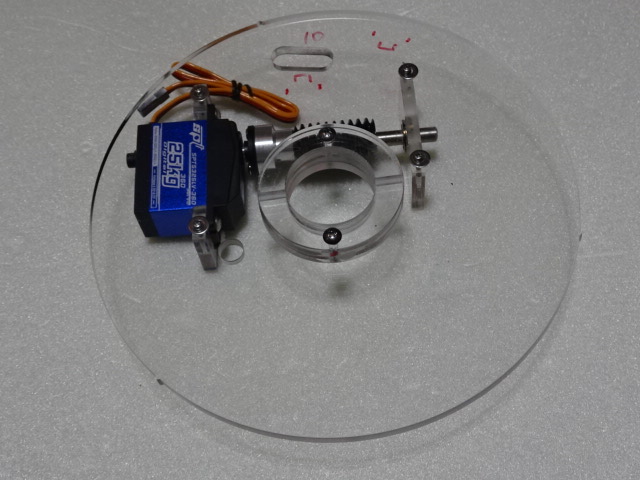
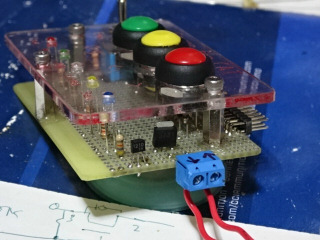
忋壓僾儗乕僩偵偍傗偮擖傟傪僕僋儘儘儊僞儞偱愙拝偟偰夞揮晹傪姰惉偱偡丅

夞揮晹偺壓偵晘偔僥僼儘儞偺杸嶤儕儞僌傪俀屄嶌傝捈偟傑偟偨丅

侾侾寧俀擔
僼僅僩僀儞僞儔僾僞偺幷暳斅傪夞揮晹偵愙拝偟傑偟偨丅俀枃晅偄偰偄傞強偑僆儕僕儞埵抲偱偡丅

侾侾寧俇擔
塧偲偍傗偮偺働乕僗傪俆倣倣偺僗僥乕傪巊偭偰崌懱偝偣傑偟偨丅

儀儖偲嬱摦儌乕僞傕僇儊儔偺屻傠偵屌掕偟傑偟偨丅

偍傗偮梡偼傾僋儕儖僷僀僾偺撪宎偑嵶偄偺偱搳擖帪偵僗儉乕僘偵擖傞傛偆偵忋僾儗乕僩偺壓偵儁僢僩儃僩儖傪壛岺偟偰楻搇傪庢傝晅偗傑偟偨丅


侾侾寧侾侽擔
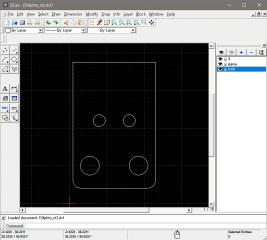
儅僯儏傾儖憖嶌僷僱儖偺恾柺傪倯們倎倓偱嶌惉偟傑偡丅儗乕僓壛岺婡偱俁倣倣岤偺傾僋儕儖偐傜愗傝弌偟傑偟偨丅暥帤偼暿僨乕僞偵偟偰丄庛偄儗乕僓偱暥帤擖傟偟傑偡丅
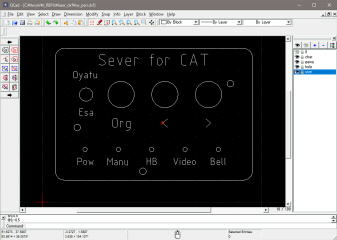
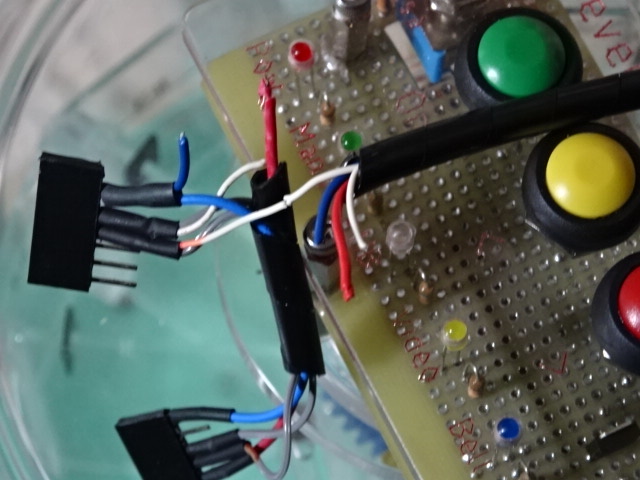
儅僯儏傾儖憖嶌僷僱儖偺攝慄傪捛壛偟傑偟偨丅俵俠俹俀俁侽侾俈偵愙懕偟傑偡丅僗僀僢僠擖椡偲俴俤俢弌椡丄奼挘偲偟偰悈愗傟僙儞僒丄徠柧惂屼弌椡傪捛壛梊掕偱偡丅

侾侾寧侾侾擔
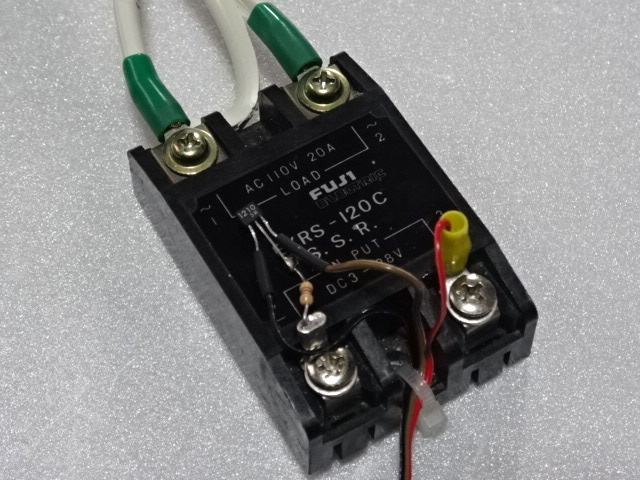
僒乕儃儌乕僞偺揹尮梡偺儘乕僪僗僀僢僠傪廐寧偱峸擖偟傑偟偨丅倫亅們倛偺俀俽俰俇俉侾偱偡丅
侾侾寧侾俁擔
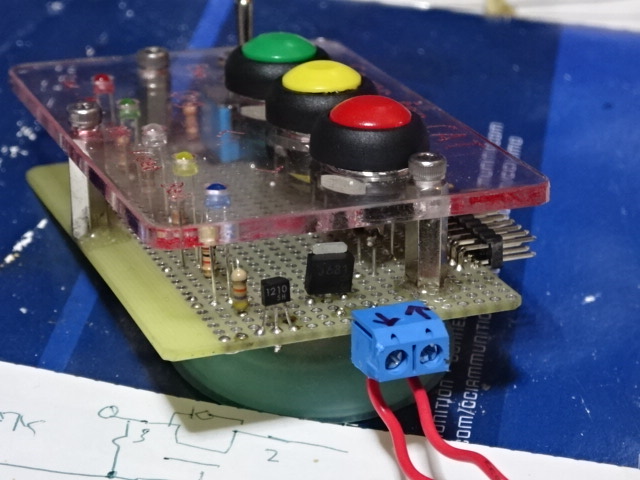
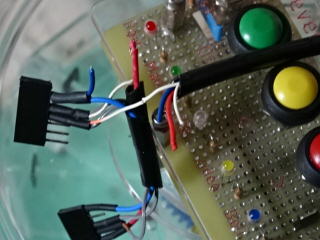
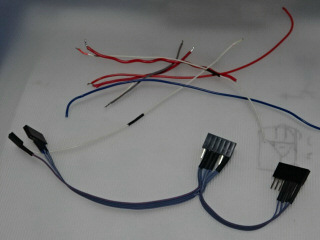
儅僯儏傾儖憖嶌僷僱儖婎斅偵値亅們倛偺僨僕僩儔偲慻傢偣偰儘乕僪僗僀僢僠傪嶌惢偟偰抂巕戜偐傜俹俠俙俋俇俉俆婎斅偺儌乕僞揹尮偵攝慄偟傑偡丅
働乕僕墶偺儔僢僋偵偹偙僒乕僶傪愝抲偟傑偡丅

偍傗偮偲塧偺攔弌岥偵僗僾儗乕儃僩儖偺楻搇傪晅偗儂乕僗傪愙懕偟傑偡丅

儂乕僗傪働乕僕撪偵擖傟偰塧擖傟偵愙懕偟傑偡丅

侾侾寧侾係擔
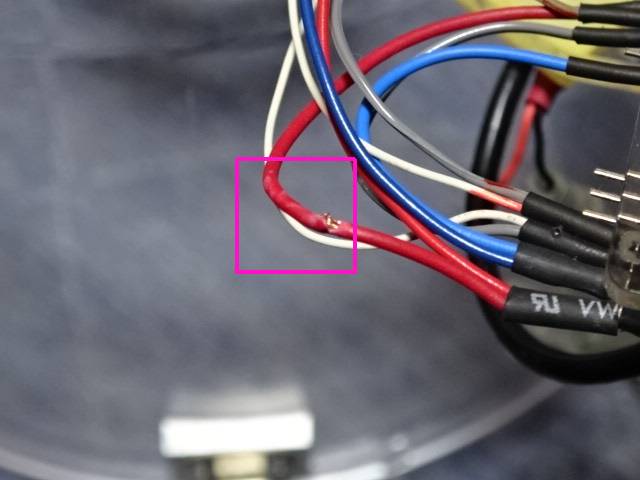
僥僗僩塣梡拞偱偡偑丄偹偙偑忔傞丄攝慄傪偐偠傞偼偱丄僇僶乕傪晅偗傞昁梫偑偁傝偦偆偱偡丅

侾侾寧侾俆擔
偐偠傜傟傑偟偨丅僇僶乕梡偵俹俤俿斅傪拲暥偟偰偍偒傑偟偨丅
侾侾寧侾俉擔
儎僼僆僋偱峸擖偺僇僶乕梡偺侾丏俆倣倣岤偺俹俤俿斅偑摓拝偟傑偟偨丅

俹俤俿斅偼傾僋儕儖嬋偘僸乕僞傪巊偭偰丄俴帤偵嬋偘傑偡丅偙傟傪俀偮巊偭偰僇僶乕偺懁傪嶌惉偟傑偡丅


侾侾寧侾俋擔
侾侽倣倣妏偺傾僋儕儖朹偱俀偮傪愙懕偟偰丄偲傝偁偊偢丄懁偩偗偱愝抲偟偰僒僀僘傪妋擣偟傑偡丅挌搙椙偄傛偆偱偡丅壓偵晘偄偰偁傞俵俢儃乕僪偼僒僀僘偑彫偝偄偱偡丅偹偙偼嫽枴怺乆偱偡丅

忋僇僶乕偺埵抲寛傔傾僋儕儖晹昳傪嶌惢偟偰丄忋僇僶乕傕姰惉偟傑偟偨丅


忋懁偼僇儊儔偑忋傪岦偄偨偲偒偺僗儁乕僗傪妋曐偟偰偄傑偡丅

侾侾寧俀侽擔
壓偵晘偄偰偁傞斅偑彫偝偄偺偱嶌傝捈偟傑偟偨丅嬤強偺侾侽侽嬒偺俵俢儃乕僪偑攧傝愗傟偺偨傔丄戙傢傝偵侾侽倣倣偺崌傢偣斅傪巊偄傑偟偨丅

侾侾寧俀侾擔
偐偠傜傟偨俬俀俠働乕僽儖傕嶌傝捈偟傑偟偨丅
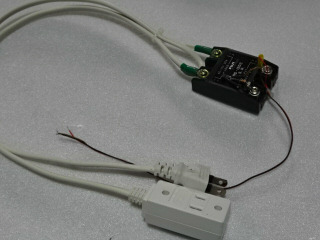
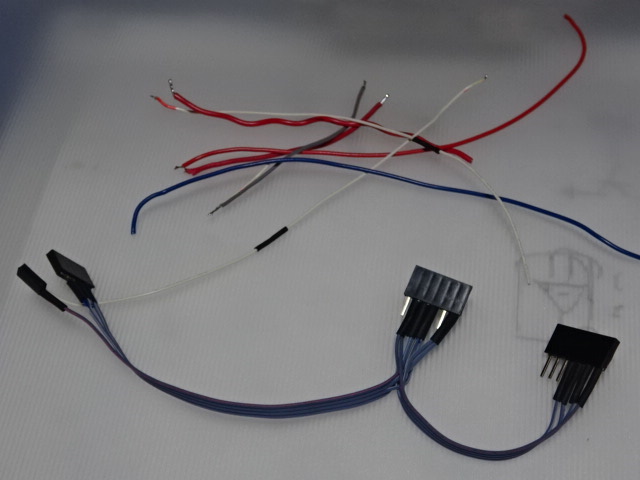
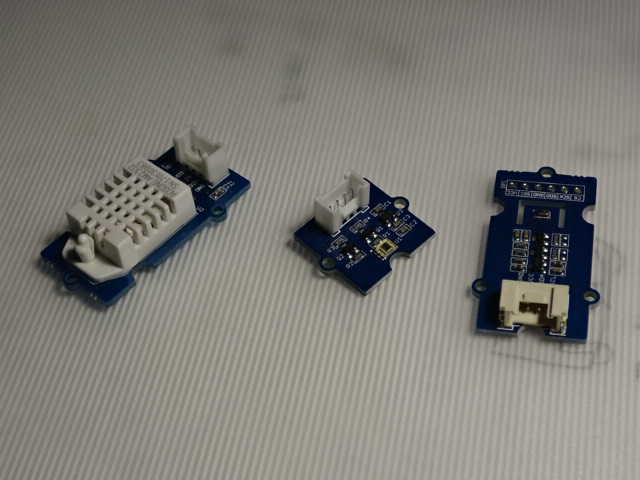
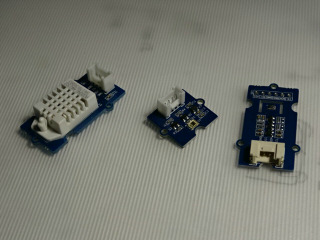
捛壛偱愙懕梊掕偺俽倕倕倕倓偺僙儞僒偱偡丅巇帠偱嶌偭偨帋嶌昳偐傜奜偟偨暔偱偡丅嵍偐傜壏幖搙丄徠搙丄婥埑僙儞僒偱偡丅壏幖搙偼僀儞僞乕僼僃乕僗偑儚儞儚僀儎偱偟偨丅廐寧偵摨偠僞僀僾偺俬俀俠偺壏幖搙僙儞僒偑攧偭偰偄傑偟偨丅侾屄偩偗儚儞儚僀儎偲偄偆偺傕偄傑偄偪側偺偱丄俬俀俠傪巊偆梊掕偱偡丅儘僌傪庢傟偽幒撪娐嫬偑婰榐偱偒傑偡偑丄俽俢僇乕僪偵懡偔彂偒崬傓偲憗偔夡傟傞偨傔丄儔僘儀儕乕僷僀係偺儊僀儞僒乕僶偵憲偭偰俽俽俢偵婰榐偟偨曽偑椙偝偦偆偱偡丅
栭偼埫偔偰僇儊儔偑幨傜側偄偺偱丄俙俠侾侽侽偺俴俤俢徠柧傪捛壛偟傑偡丅俧俹俷偐傜惂屼偱偒傞傛偆偵庤帩偪偺僜儕僢僪僗僥乕僩儕儗乕傪巊偄傑偡丅儕儗乕傪僥乕僽儖僞僢僾偵妱傝崬傑偣偰丄僨僕僩儔傪夘偟偰惂屼偟傑偡丅