アルドウィーノを使った
アルドウィーノを使った
オープンソース、オープンハードの
ローコストECU
テージのECUが壊れていた時は
Speeduinoに装換する予定です。
その6:エンジンへの接続準備の続き
2024年
2月3日
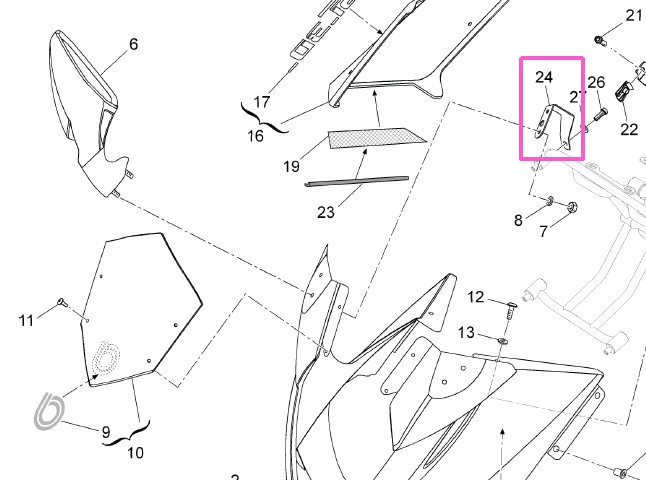
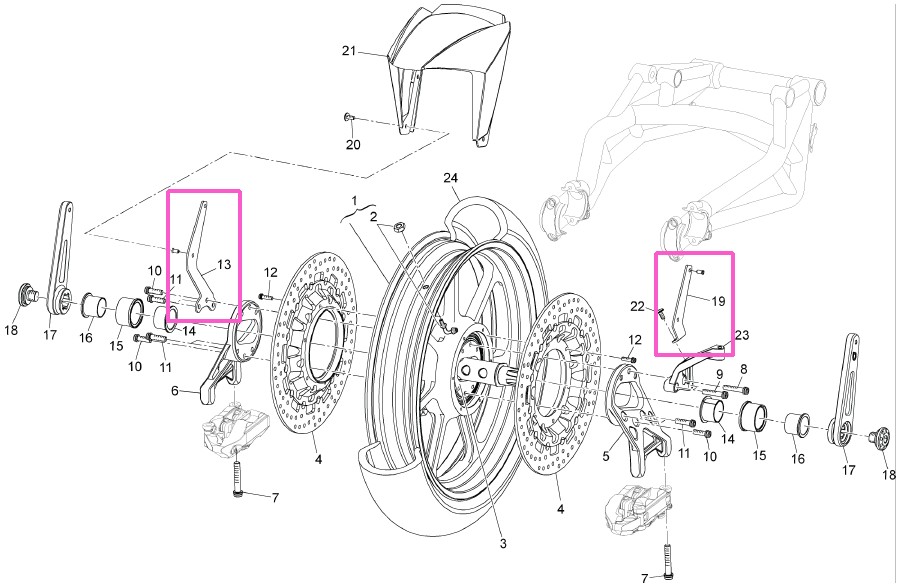
フロントフェアリングが外れているので、サイドミラーをフェアリンクに固定している鉄プレートをウエットカーボンで作製します。赤枠がプレートで左右で形が違います。

ポリエステルテープを巻いて、プレートを角材に固定しておきます。

平織カーボン繊維は20年以上前に購入した日本製です。今は中国製が安く買えると思います。

ポリエステル樹脂と最近購入した硬化剤です。硬化剤は劣化すると全く硬化しないです。

ポリエステルテープを巻いたプレートに直接積層します。7〜8層で厚みが出ます。

硬化後、プレートを離型します。ポリエステルテープは樹脂に接着しないので簡単に離型出来ます。

ディスクグラインダで整形して、片側完成です。穴開け後にクリア塗装して仕上げる予定です。

2月4日
もう片側も積層しました。クリア塗装の代りに残っているポリエステル樹脂をコーティングしました。気温が低いのでストーブで温めます。


2月5日
穴開けを行い、鉄製と重さを比べてみます。オリジナルの鉄製が約60gに対して、作製したカーボン製は約20gでした。


2月6日
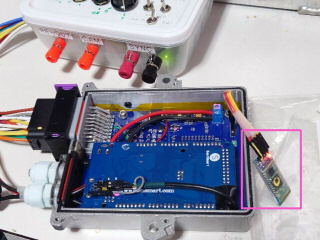
アマゾンでbluetoothモジュールが売っているので、Speeduino用に購入してありました。型番はHC−06で子機専用です。因みに技適は取って無いです。

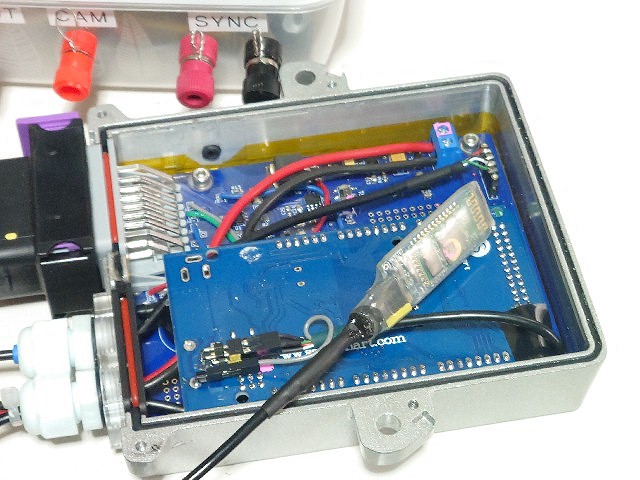
Speeduino基板にはbluetoothモジュールが接続できるようにコネ
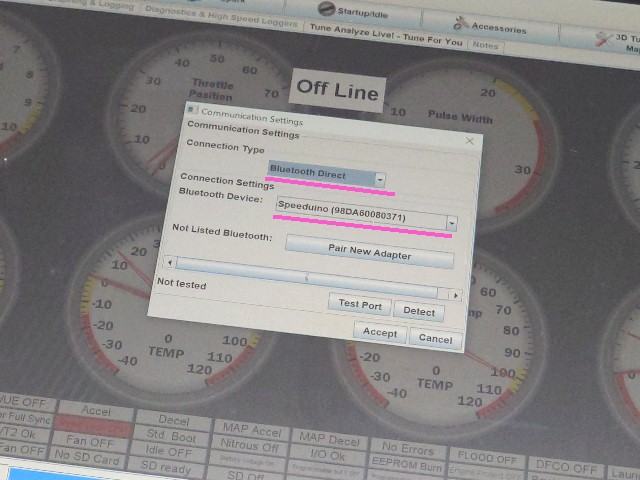
クタが付いています。タブレットを入手したので、接続確認を行います。HC−06の使い方のWEBページを参考にして、予め、PCでモジュールの通信通信速度を115200bpsに合わせて、適当に名前を付けておきます。設定は癖があり、通信文の後に
CRやLFを付けると上手く行きません。また、1秒以内に通信文を送る必要があるので、手動では送れません。要注意です。設定後にタブレットとモジュールを
ペアリングしておきます。
タブレットのTunerStudioで通信ポートをBluetoothに設定すれば接続できます。通信が確立するとモジュールのLEDは点滅から点灯に変わります。タブレットとSpeeduinoの
USBケーブルが無くなればスッキリします。


通信確認が出来たので、bluetoothモジュールを防水加工しました。ケーブルグランドを通す接続ケーブルを作製しておきました。

2月10日
アナログディスカバリのレコードモードを使って、始動時の点火/噴射タイミングを確認します。アナログディスカバリはFPGAベースのため、測定データのサンプル数が8K/16Kと少ないですが、レコードモードを使うとUSB経由でPCに測定データを送るため、長時間測定ができます。分岐ケーブルでSpeeduinoを接続して、オリジナルECUでエンジンを始動して、タイミングを比較します。

レコードモードで測定して拡大した、始動時のインジェクタの噴射波形です。上がSpeeduino、下がオリジナルです。赤枠の所に余分に噴射しています。カム角信号の2歯抜けの基準が本来とは別の位置に入力されたと誤認識されているためと思われます。因みに噴射幅が広いのは始動時のセッティングがまだ出来ていないからです。始動時
の余分な噴射はプラグが”かぶって”しまうため避ける必要があります。

2月12日
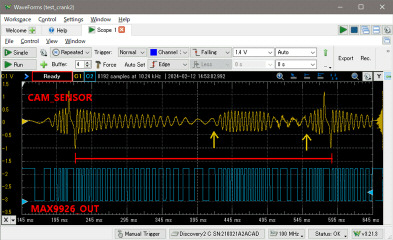
カム角センサと波形整形ICのMAX9926出力をレコードモードで測定します。Lツインはクランキング中は圧縮によって回転が変動していることが分かります。赤ラインがクランク2回転で、黄色の矢印が上死点です。上死点までの圧縮行程は徐々に回転が落ちています。Speeduinoの歯抜けのトリガの解説にもありますが、ソフトウェアで
カム角の歯抜けを基準にしていため、クランクが2回転するうちに回転が落ちて歯抜けと同じようなタイミングがあると、回転が速くなったのと同じように誤動作します。
この対策として、Speeduinoにはカム角のトリガフィルタがあり、4段階で調整可能です。

トリガフィルタはデ
フォルトでOFFですが、試しに”強”にした所、噴射されない所が出て、フィルタが効き過ぎでした。”中”か”弱”に設定して再度確認します。

2月16日
Lツイン特有のクランキング時の回転変動を机上シミュレーションできるように、アナログディスカバリのオシロで測定した波形データを同じアナログディスカバリの波形発生器で出力してエンジンエミュレータに入力できるようにします。下は以前にアナログディスカバリで取り込んだ、クランキング時のカム角センサのアナログ信号と波形整形ICのMAX9926のデジタル波形です。
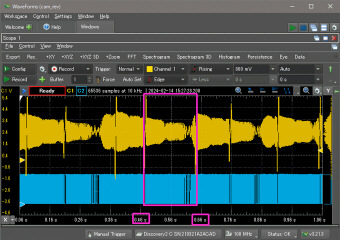
拡大して、使いたい範囲を確認します。ここでは段々回転が遅くなり、歯抜け以上にパルス幅が広くなり、また元に戻る範囲を指定します。使いたい範囲の時間軸の値をメモっておきます。

波形データをCSVでエクスポートします。デジタルデータのみ使用するのでチャンネル2を指定してエクスポートします。

オープンオフィスの表計算に読み込みます。カラム1が相対時間、2が波形データです。データ数が大きいので動作が重いです。

メモっておいた時間軸の値を参考に余分なデータを削除して、使いたい部分のみします。カラム2を選んで棒グラフを出して全体を確認します。

波形発生器は赤枠のギアボタンから波形データをインポートできます。

オープンオフィスでセーブしたCSVの波形データをインポートします。

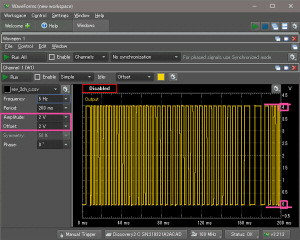
波形データのカラム2を指定してインポートします。プレビュー波形が表示されます。

出力する前に、振幅を調整します。ここではオフセットを2Vに、振幅も2Vに設定します。これで0〜4Vの振幅になります。周波数を設定すれば自由に回転速度を設定できます。周波数*2*60でrpmに変換できます。
2月17日
アナログディスカバリの波形発生器から回転変動のあるカム角信号をエンジンエミュレータに入力して動作確認します。エンジンエミュレータに外部からカム角信号を入力できるように3.5mmジャックを追加しました。

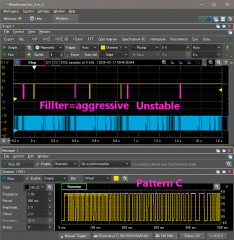
後半に歯抜け以上にパルス幅が広くなるパターンCです。トリガフィルタは”弱”で動作は安定しています。以降、波形は上から水平側インジェクタ出力、カム角信号、波形発生器出力(カム角信号)です。

同じパターンCのトリガフィルタ”アグレッシブ”です。安定しません。赤が本来の噴射タイミングのはずです。
中央後ろ寄りに歯抜け以上にパルス幅が広くなるパターンDです。トリガフィルタは”弱”で安定動作しています。

同じパターンDのトリガフィルタ”アグレッシブ”です。安定しません。青が本来の噴射タイミングのはずです。

トリガフィルタが”アグレッシブ”以外の”OFF〜弱〜中”であれば、歯抜け以上のパルスが途中で出現しても正しいタイミングで動作しています。ただ、低回転の時はTunerStudioの回転計にブレが出ました。下は240rpmの時です。クリックすると短い動画を再生します。

600rpmでは回転計が安定しました。クリックすと短い動画を再生します。

実際には回転が変動している同じパターンが連続するわけではないので、試にパターンCとパターンDを繋げてみました。回転数は240rpmです。トリガフィルタは”弱”で安定しています。

2月18日
フロントフェンダの固定ステーをウエットカーボンで作製します。赤枠が今回作製するフロントフェンダのステーです。左右で形が違います。

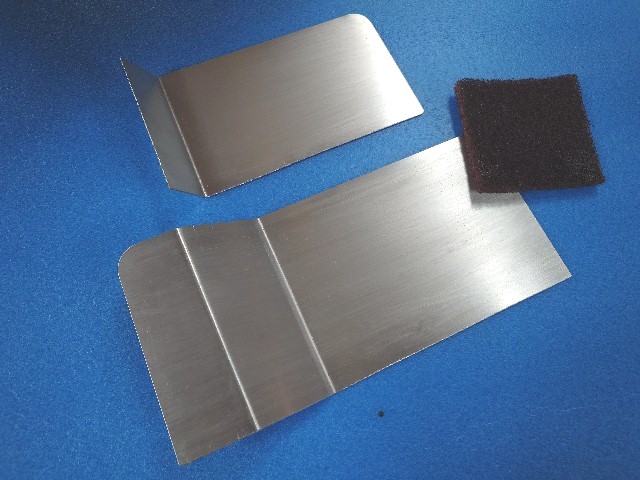
ステーを取り外しました。ステンレス板とブランドナットで出来ています。結構重いです。

自作のシートベンダでステーと同じ角度になるように0.5mm厚のアルミ板を曲げて型を作製します。

型が完成しました。

型のアルミ板の表面をサンドスポンジでヘアラインを入れて細かいキズを取ります。

型のアルミ板は薄いのでべニアに固定し、離型ワックスを塗ります。

ポリエステル樹脂でカーボンクロスを16層積層しました。

2月19日
離型して、外径を大まかに整形します。


外形を仕上げてました。左の角穴はステーがブレーキサポートと共締めなので、3つある8mmボルトの1つはステーを挟まないようにスキップします。樹脂を挟むとトルクが掛かからないです。

チョップドカーボン樹脂でフェンダを固定するナイロンナットを固定しました。

2月20日
チョップドカーボンが硬化したので固定ボルトを外しました。ナイロンナットの固定が完了です。

左側のステーを取り付けました。ボルトがステーの奥側なので、固定に難儀します。

せっかくなので、右側の8mmの固定ボルトはチタン製を購入しました。30mm2本と25mmです。新しいステーでフェンダを取り付けました。


ステーは外から見える所が少ないです(笑)。ステーのカーボン化が完了です。

2月22日
Speeduino用に使用するKoso社のRX−4メータユニットを購入しようと検索すると、ebayで直ぐに見つかりました。

日本の代理店に確認すると、ほぼ同じ価格でした。ebayだと関税がかかるのと、万が一初期故障などの場合には代理店の方が良さそうです。今回は代理店経由で発注しました。納期は2週間です。

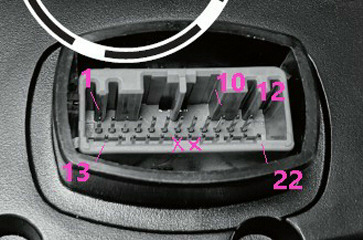
RX−4は汎用モデルとヤマハに直付け(元のメータと交換)できるモデルがあります。汎用モデルにはコネクタケーブルが付属していますが、切断されたケーブルにハーネスを圧着/半田付けする必要があります。このコネクタが入手できれば直接ハーネスに接続でき、スッキリします。このコネクタのコンタクトを数えると28極でした。

メータユニットの裏側はこんな感じです。

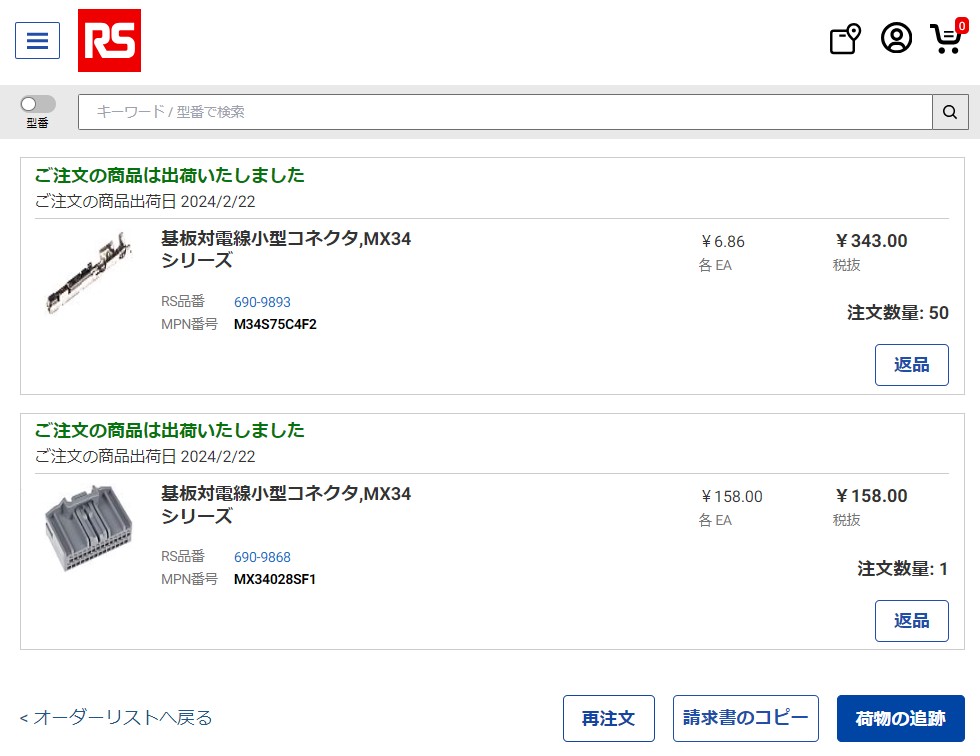
下はヤマハの直付けモデルのコネクタです。こちらはブランクがあり22極でした。コネクタのサイズは汎用モデルと同じと思われます。初め、アリエクスプレスで自動車用の28ピンで検索すると、直ぐに見つかり、カーオーディオに多く使われているコネクタと判明しました。型番からメーカはJAEでした。
アリエクスプレスは納期が長く、一ヶ月以上かかるので、別で検索しているとRSコンポーネンツでも購入可能でした。早速、発注しておきました。