アルドウィーノを使った
アルドウィーノを使った
オープンソース、オープンハードの
ローコストECU
テージのECUが壊れていた時は
Speeduinoに装換する予定です。
その8:デュアルホイールへの変更
2024年
4月17日
エンジン始動中にアフターファイヤで凄い爆発音がして、排気ダクトが千切れました(笑)。点火タイミングが合ってないと起こります。クランキング時に圧縮のため回転が一定しないのが原因です。48歯2歯抜け(ミッシングトゥース)でタイミングを作っているため、クランキング時に歯抜けと同じパルス幅が出現すると上死点がズレます。Speeduinoの要件に”ミッシングトゥースのクランクおよびカムデコーダでは、ホイールが回転中、ほぼ同じ速度で回転している必要があります”とあります。バッテリが減ってくると現象が顕著になります。根本的な解決は歯抜けをやめて、デュアルホイールにすることです。


4月18日
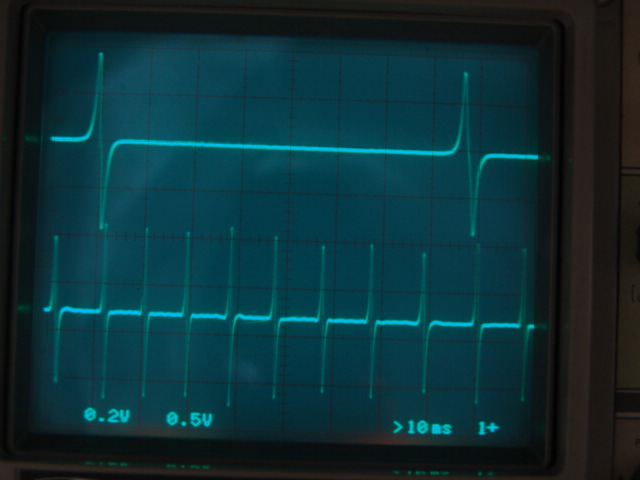
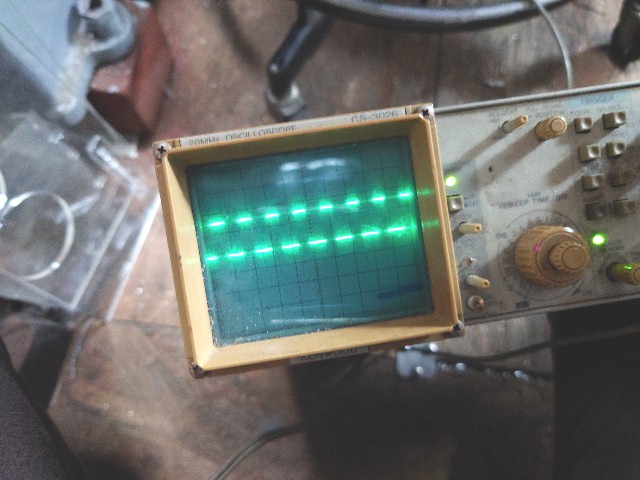
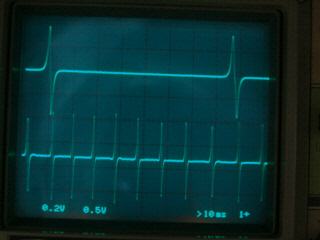
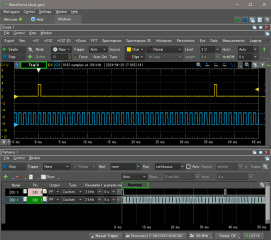
下はドカの851のデュアルホイール波形です。下が主パルス(8歯)、上が副パルス(1歯)です。副パルスがカム角の絶対基準になり、これにより、クランキング中に回転が変動しても歯抜けのような問題は起こらないです。
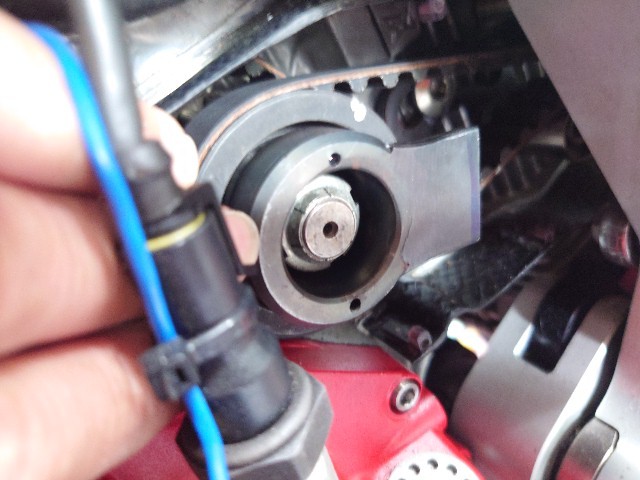
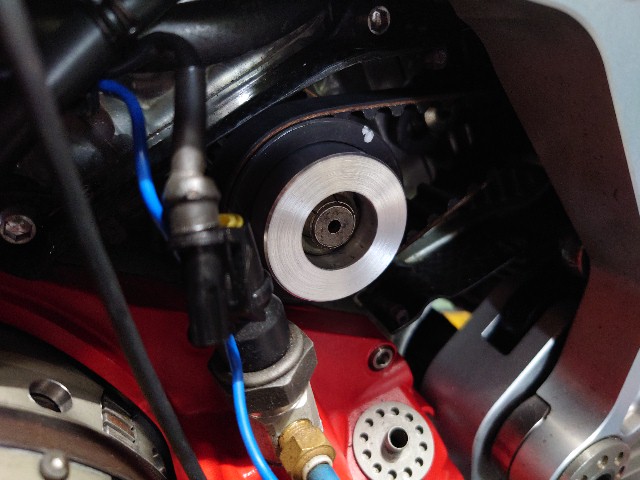
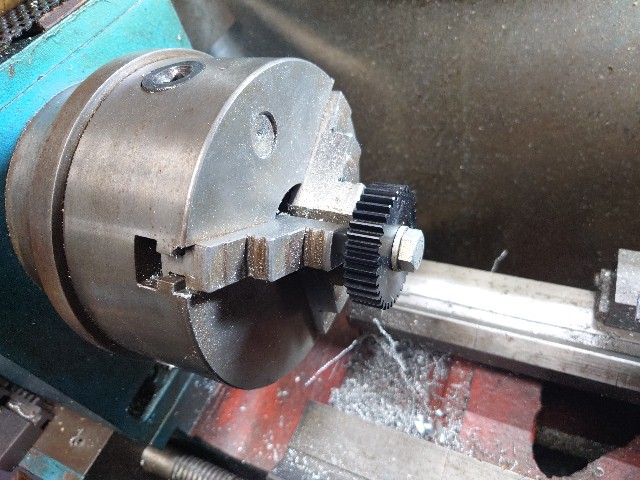
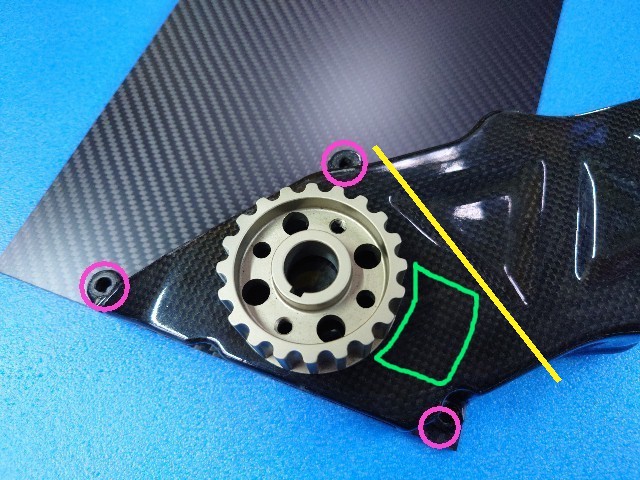
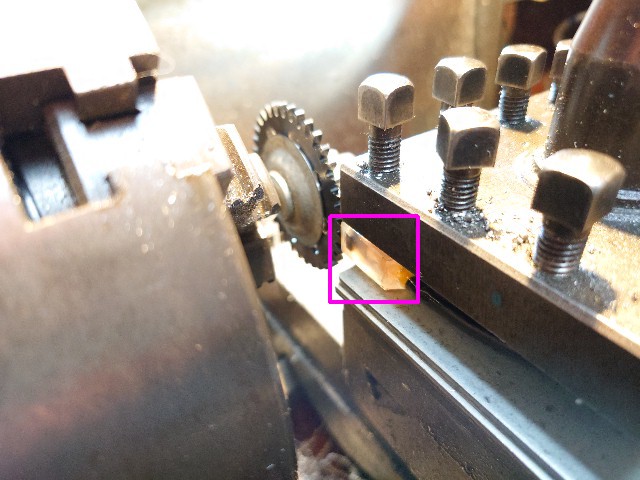
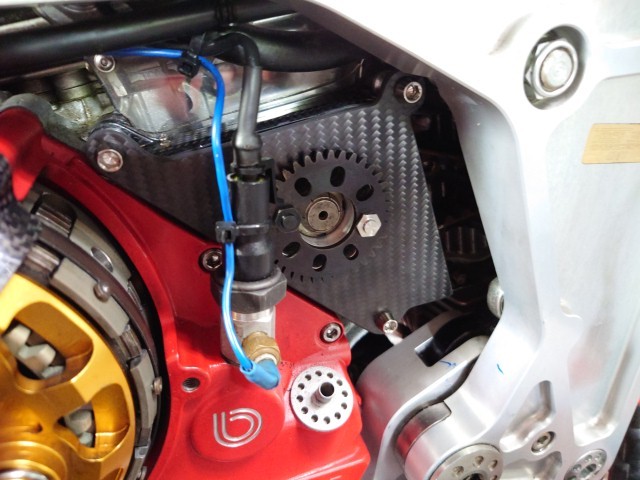
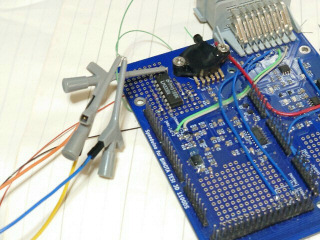
デュアルホイールに変更する考察です。ホイールはカムと同じ回転が必要です。タイミングベルトの駆動シャフトはカムと同じ回転で、このシャフトを延長するのが簡単そうです。下はポリカーボネートのカバーを外したところです。2バルブのベルトプーリは直径60mmで、6mmネジが2個切ってあり、ここに延長シャフトが固定できそうです。ギアを取り付けて回転センサで主パルスを発生させます。副パルスは1回転に1回発生させれば良いです。主パルスの要件は720を割れることです。モジュール1.5の36歯ギアの直径約56mmで良さそうです。

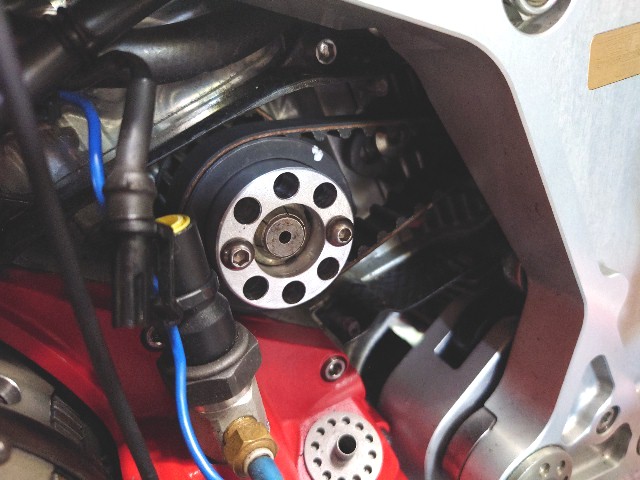
ebayでアルミ製のプーリを購入済みで、この交換と同時に延長シャフトの追加も行いたいと思います。下は1年位まえに作製していた、ドライブプーリの回り止めSSTです。バーはまだ溶接していないです。


オリジナルの鉄製プーリにアルミプリ―用に作製した回り止めSSTはピン位置が違っていて勘合しないです。

こちらは大分まえに851用に購入した回り止めSSTです。851のプーリは一回り小さい18歯ですが、型番から4バルブの851と2バルブのムルティ1100の回り止めは共通でした。

テージにはフレームが邪魔で入らないので、確認のためバーをカットして勘合を確認しました。後で、段をつけてバーを溶接してテージにも使えるようにします。

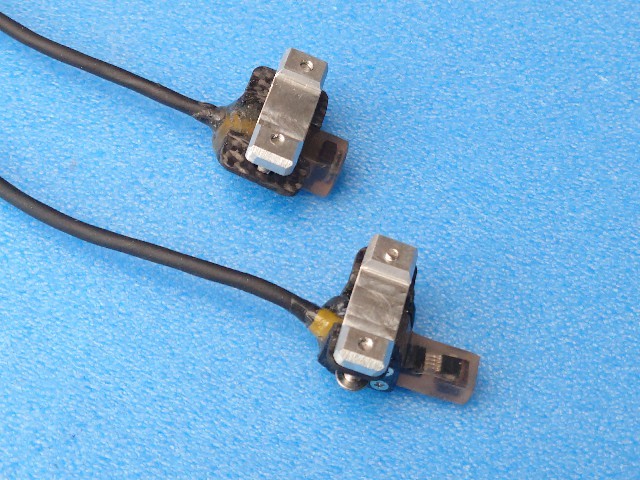
回転センサはバーキンのケントエンジンのインジェクション化で使った下の磁気抵抗センサが使えそうです。18年前と同じ2個で300円で売っています(笑)。鉄製のギアの凹凸がセンスできるように、磁石が内蔵されて、電源を接続するだけで電流モードで信号が取り出せます。Speeduinoに接続するにはコンパレータが必要です。センサは単体では扱いにくいので、バーキンの時はポリエステル樹脂で固めて使っていました。


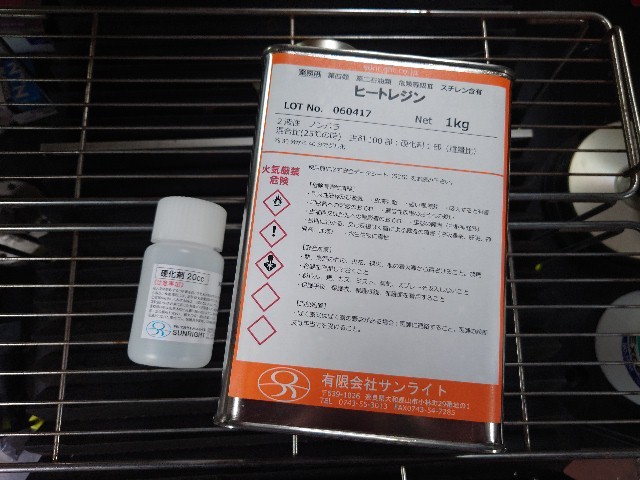
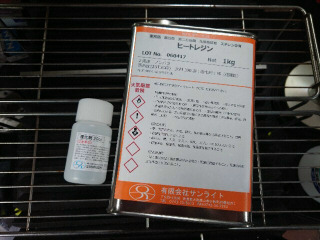
150℃の耐熱ポリエステル樹脂を購入しました。これにセンサを封印して使用する予定です。
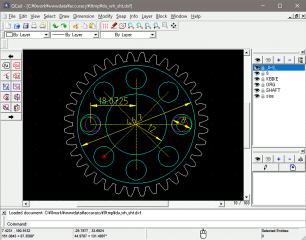
延長シャフトの図面を作製しました。外側はモジュール1.5の36歯ギアです。寸法を確認したところ、大き目の固定穴を開ければ、オリジナルの鉄製とアルミ製のプーリの双方に共用できそうです。
延長シャフトの作製を開始しました。シャフトは外径46.7mm、内径24mmでアルミで作製します。とりあえず、外径を削りました。

モノタロウで購入した鉄製のモジュール1.5の36歯ギアです。厚みが厚くて15mmもあります。重いので2.5mm位まで薄くします。副パルスは固定ボルトの内、1本を鉄製に、もう一本をSUS304のステンレス製にすれば1回転で1パルス出力できるはずです。

4月19日
延長シャフトの作製の続きです。内径24mmで中ぐりしました。

シャフトの高さは22mmにして、本体は完成です。


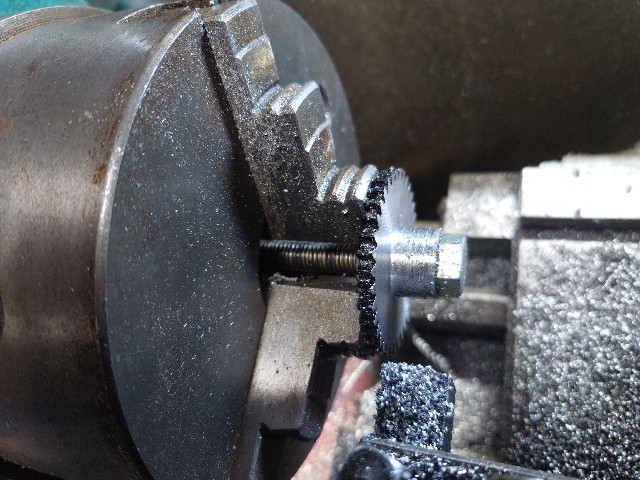
駆動プーリに勘合させてみます。良いようです。

固定穴をインデックス盤で加工します。8mmで45度、8ヶ所穴開けしました。

延長シャフトが完成しました。

現在付いているオリジナルの鉄製プーリとアルミ製プーリの双方に固定できます。


秋月で購入した非接触回転センサも到着してます。

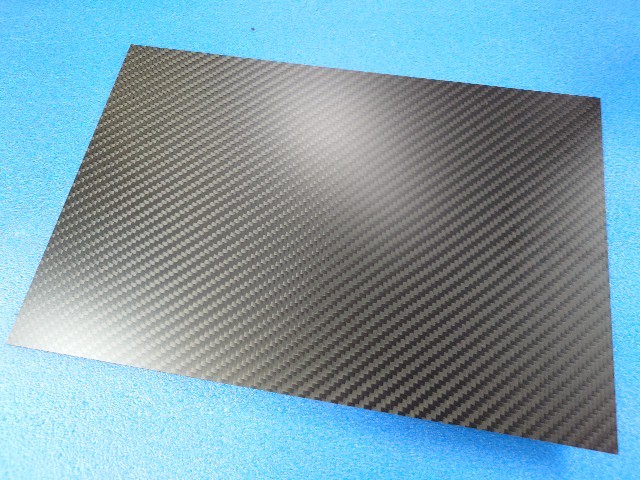
回転センサを取り付ける2.5mm厚のカーボン板をアマゾンで発注しておきました。

4月20日
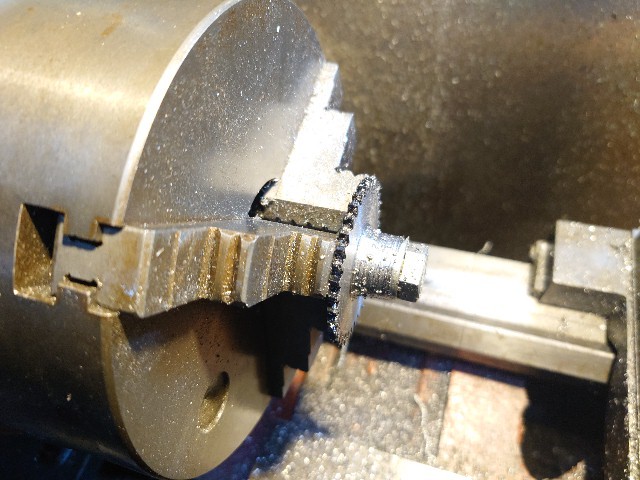
36歯ギアの厚みは15mmあるので、旋盤で薄く加工します。


とりあえず、5mmまで削りました。

非接触回転センサにケーブルを半田付けしました。ケーブルはTPS用に購入した2芯シールド線です。

耐熱ポリエステル樹脂で注型します。温度が上がらないように硬化剤を少な目にしておきます。

アマゾンで購入の2.5mmのカーボン板が到着しました。センサを固定するベース板を作製します。
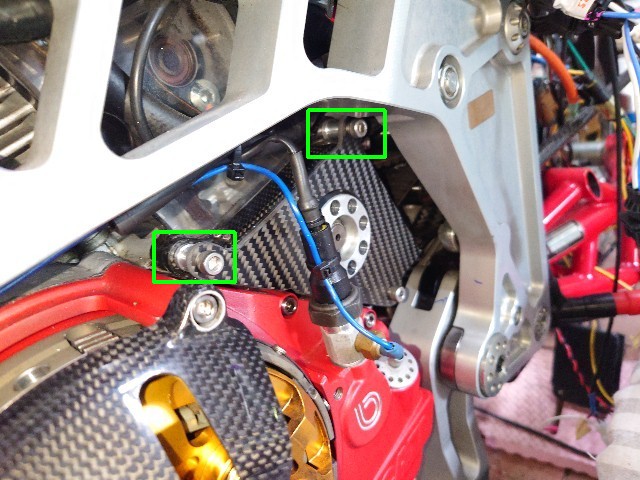
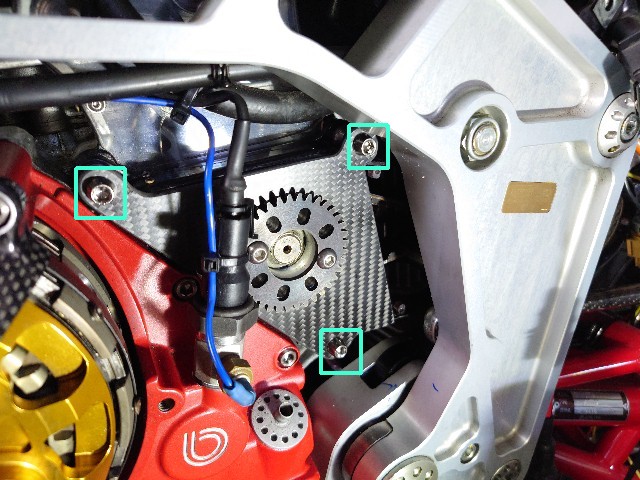
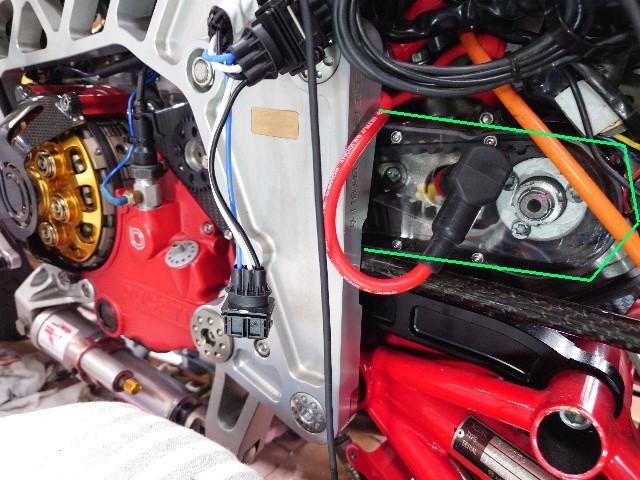
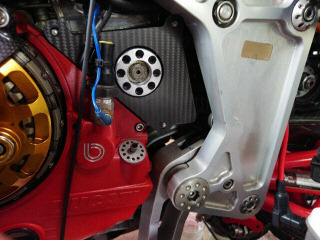
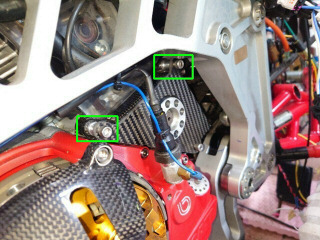
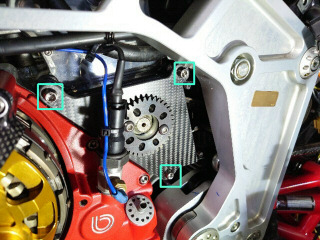
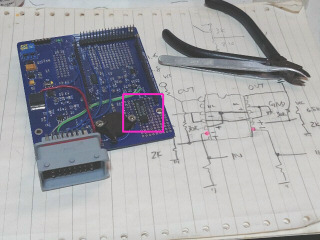
オリジナルのベルトカバーと合わせてみます。ベース板は赤丸の3ヶ所と共締めします。黄線の右はフレームなので、センサを取り付けるのは緑枠のエリアです。

4月21日
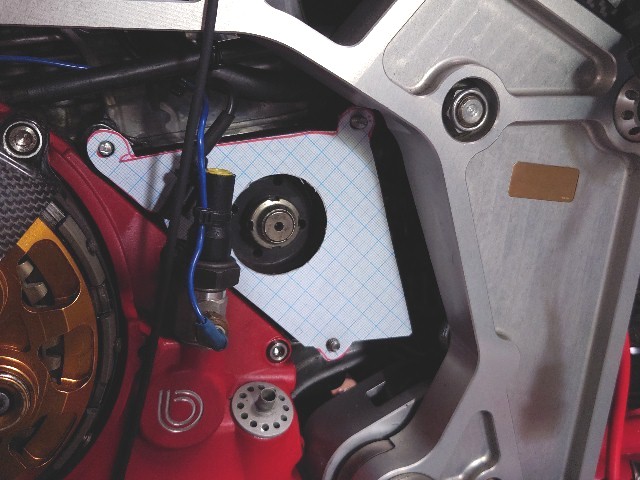
ベース板の型紙を作製しました。6mmの全ネジを3本立てて位置合わせします。

型紙をカーボン板に転写します。

コンタマシンとボール盤で大まかに切り取った後、エアリュータで整形しました。
回転センサの注型が硬化したので、余分な樹脂をベルトサンダで削りました。

4月22日
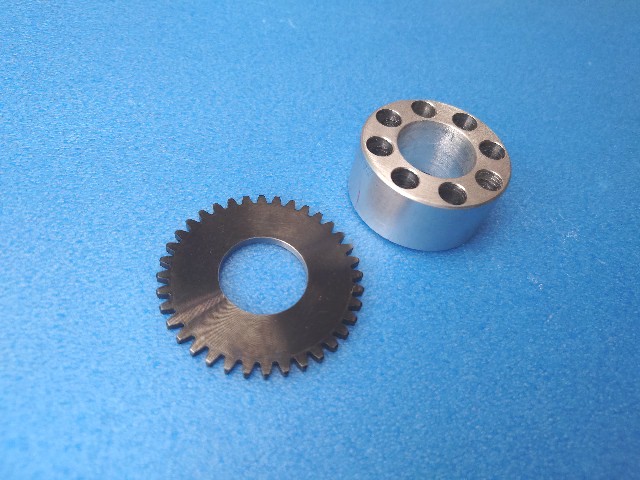
36歯ギアは厚みを約3mmまで削りました。その後、中穴を延長シャフトと同じ24mmにしました。


プライマリ用の36歯ギアの厚み加工が終了しました。

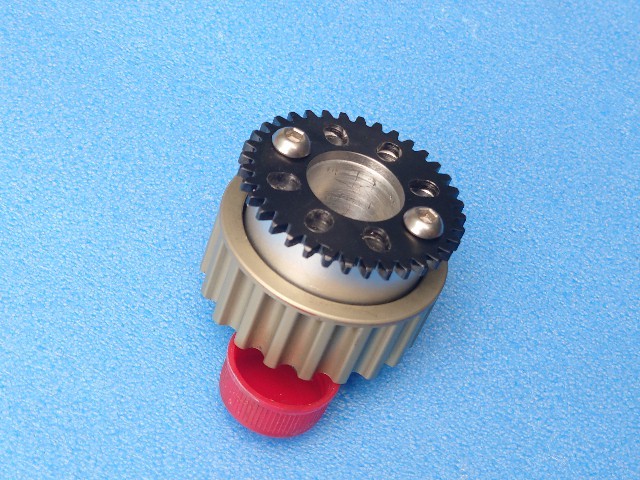
続いて、インデックス盤で固定用の6mmの長穴を加工します。延長シャフトと同様に8個です。

延長シャフトを介してオリジナルの鉄プーリに仮止めしてみます。良いようです。長穴加工なので、軽量アルミプーリにも取り付けできます。


ベース板用のスペーサを作製しました。それぞれ別の高さです。作製したスペーサでベース板を仮止めしました。良いようです。

4月24日
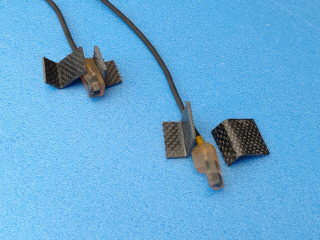
回転センサをベース板に固定するL字カーボンを作製します。耐熱ポリエステル樹脂を使います。L字のアルミチャンネルにカーボンを8層積層して同じL字チャンネルで挟みます。


L字カーボンは剥型して、回転センサの長さに合わせて切断しました。
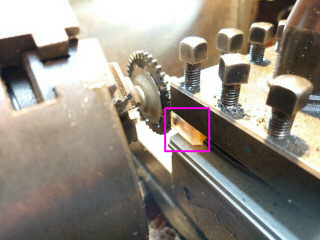
回転センサの動作確認を行います。センサに電源を接続し、旋盤でギアを回して出力を確認しました。センサ2個とも動作良好です。

36歯ギアの裏側は鉄の地が出ているので黒染めしました。

ベース板を固定する6x40mmのチタンボルトを3本、ヤフーオークションで購入しておきました。1本355円です。

4月25日
ベース板固定用のチタンボルト到着しました。

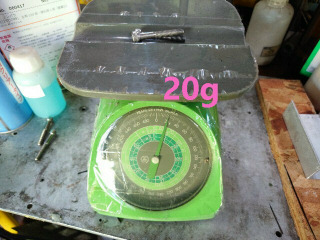
重さを測ってみます。ステンレス製ボタンキャップは2個で約20gです。チタン製は約12gでした。

早速、取り付けました。
4月26日
ホームセンタで2mmのサラネジを購入しました。ステンレスは無く、ニッケルメッキの真鍮製です。

上のサラネジを使って回転センサをL字カーボンで挟みました。セメダインスーパXで防水処理をしておきます。とりあえず、プライマリ用のみ。

ギア固定用のスペシャルボルトを作製しました。6角の頭を削ってセカンダリパルスが短くなるようにします。1つは鉄製で加工後黒染めしました。もう1つはステンレス製です。回転センサはステンレスには反応しないので、セカンダリパルスは1回転に1パルス出力されます。


4月27日
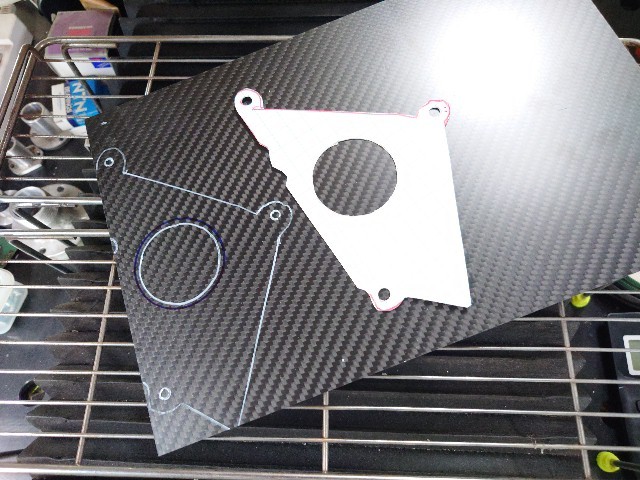
回転センサ固定用ベース板を追加したため、以前に作製した分割ベルトカバーのポリカ部を切断する必要がありました。せっかく作ったので、カバーは切断せずに残しておき、新たに先端部をポリカ板から再作しました。2mmのポリカ板はアマゾンで1日で到着しました。

後ろはベース板の所までカバーが来ます。前は以前と同じです。透明なので見にくいですが緑枠です。


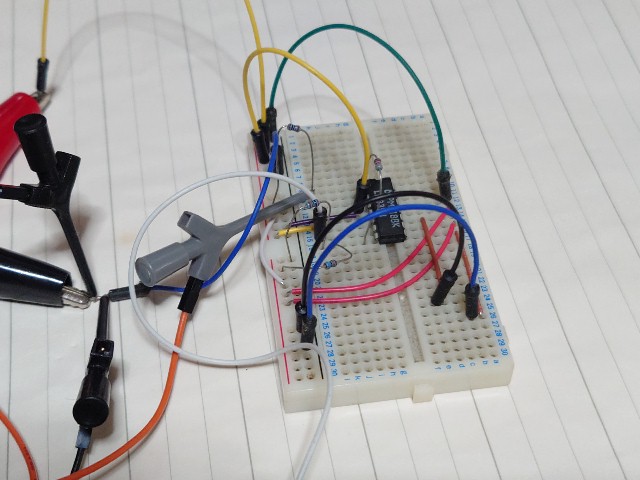
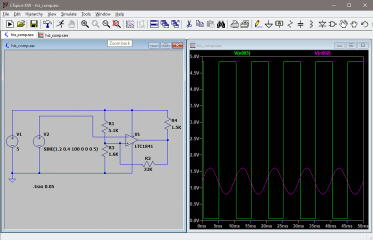
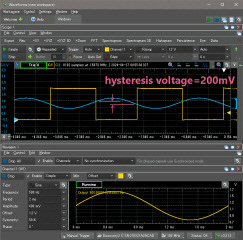
非接触回転センサの出力は矩形波でレベルは0.8〜1.6Vです。Speeduinoに入力するにはレベルシフトする必要があります。手持ちの抵抗を使ってヒステリシス付きコンパレータのシミュレーションをLtspiceで行いました。コンパレータは単電源、オープンコレクタを選びます。良いようです。
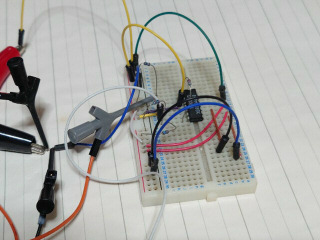
上記回路を手持ちのLM339と小型抵抗でブレッドボードで作製しました。ヒステリシスは約0.2Vになりました。動作良好です。最終的にこの回路はSpeeduinoのユニバーサルエリアに実装する予定です。
4月28日
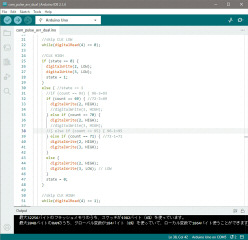
エンジンエミュレータのカム角出力をデュアルホイール用に修正しました。オシロでトリガがかけられるように追加していた、シンク信号をセカンダリパルスに使います。36歯のプライマリと1歯のセカンダリです。
4月29日
予備ボードのユニバーサルエリアに回転センサ用ヒステリシスコンパレータを追加しました。
ヒステリシスコンパレータの動作を単体で確認します。アナログディスカバリーで電源と正弦波を生成して、1チャネルづつ動作確認しました。

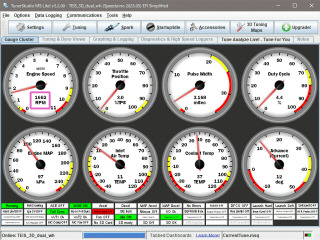
TunerStudioのトリガセッティングをデュアルホイールに変更してプロジェクトを保存します。トリガアングルは適当です。

エンジンエミュレータを接続する前に動作確認のため、アナログディスカバリーのパターンジェネレータで36歯と1歯を生成します。プライマリ36歯をMEGAのD19、セカンダリ1歯をD18に接続すれば動作するはずです。
4月30日
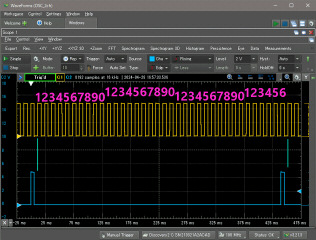
Speeduinoのトリガをデュアルホイールに設定して動作確認します。エンジンエミュレータを繋ぐ前に、プライマリとセカンダリの入力ポートD19とD18を引き出してアナログディスカバリーで確認します。
アナログディスカバリーのパターンジェネレータでプライマリの36歯とセカンダリの1歯を出力します。タイミングはカム角なので2倍し、さらに60倍で1680rpmです。
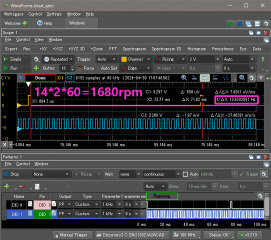
回転数は正しく認識されています。良いようです。
5月1日
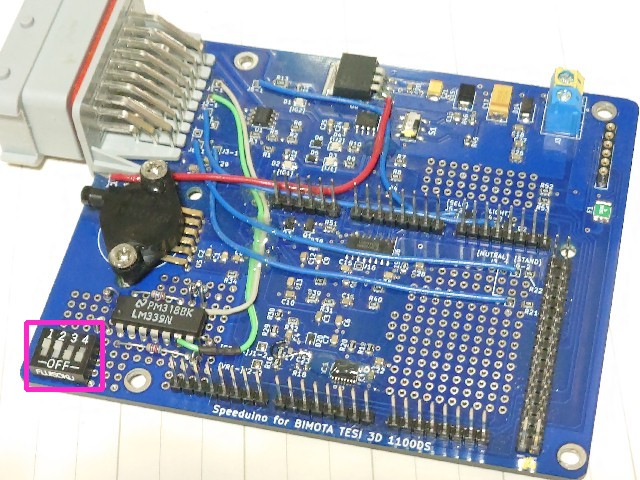
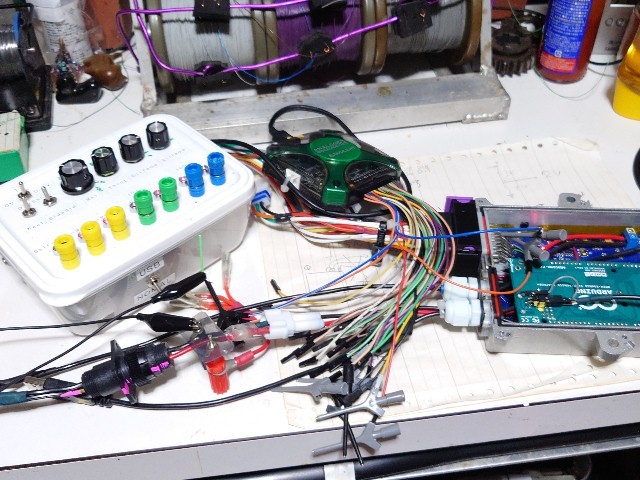
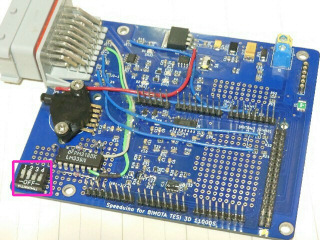
予備ボードに実装したコンパレータに配線を追加して、デュアルホイールで動くようにしまします。本物の回転センサは120Ωの負荷抵抗が必要で、赤枠のディップスイッチ追加してエンジンエミュレータ使用時は負荷抵抗を切り離します。
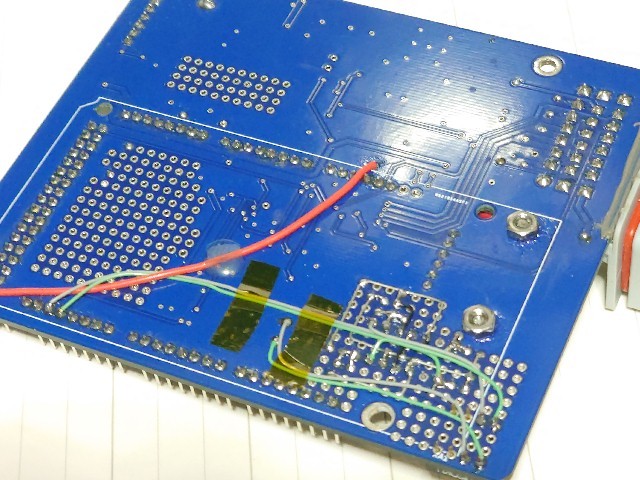
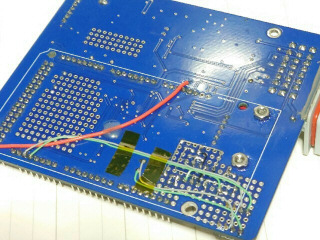
裏側はこんな感じです。
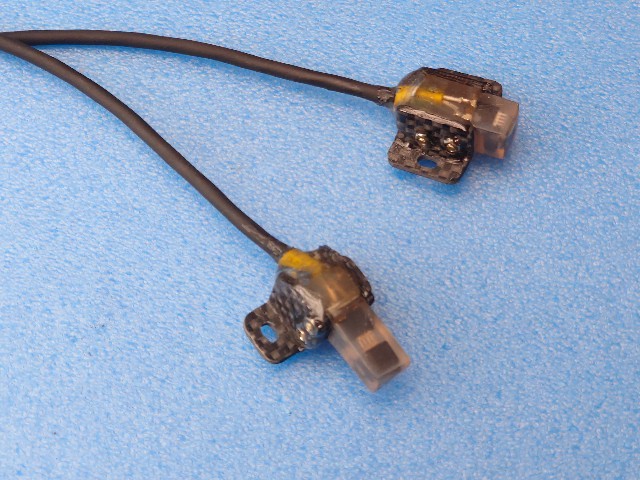
セカンダリ用の回転センサにもL字カーボンを取り付けて防水処理しました。固定穴は長穴にして位置調整ができるようにしました。

回転センサを固定するプレートを作製しました。ベース板は2.5mm厚のカーボン板のため、タップが立たないので、ジュラルミンでプレートを作製しました。固定ネジは3mmです。ベース板の裏に接着して回転センサを固定します。

5月3日
ベース板に固定穴を開けて、センサを仮止めしました。裏側にはプレートを取り付けます。


問題無さそうなので、ベース板の裏にプレートをエポキシ接着剤で接着しました。

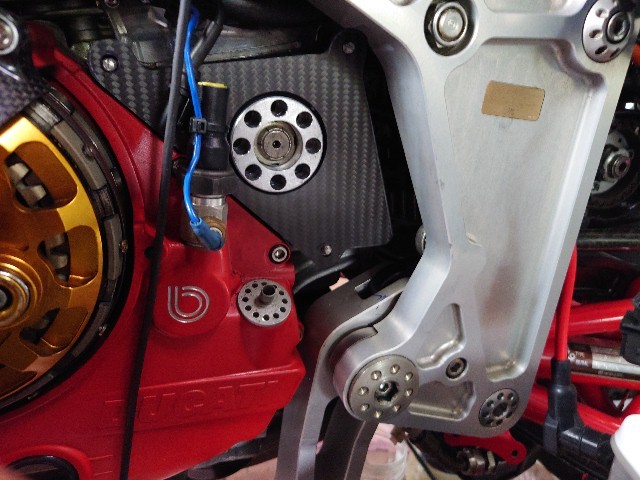
エポキシが硬化したので、車体に取り付けます。ギアとセンサのクリアランスは0.4mm位取ってあります。

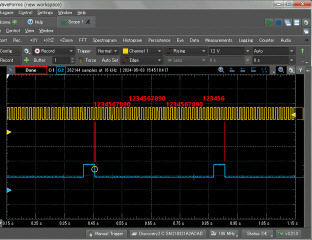
センサに負荷抵抗と電源を繋いで、プラグを外した状態でクランキングを行い、アナログディスカバリーで出力を確認します。動作良好です。セカンダリの幅はプライマリの3波強になっていました。これは固定ボルトの頭の形で生成されますが、Speeduinoはエッジを使うので幅は無関係です。実際にはヒステリシスコンパレータを通すので、信号は反転します。

デュアルホイールに修正したエンジンエミュレータでヒステリシスコンパレータを追加したSpeeduinoの動作確認を行います。クランキングから10000rpm超えまで回転数を変えて、動作良好です。
左はアイドリング付近の1000rpm、右は9500rpmです。