アルドウィーノを使った
アルドウィーノを使った
オープンソース、オープンハードの
ローコストECU
テージのECUが壊れているみたいなので
Speeduino(STM32)に装換しました。
その25:
デュアルホイールをフォトインタラプタ用に変更
2025年
6月6日
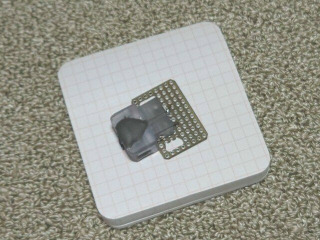
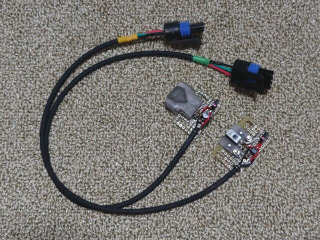
フォトインタラプタ用のホイールをCNCフライスで作製しました。板材は1.5mm厚のA5052ですが、けっこうバリが出ます。
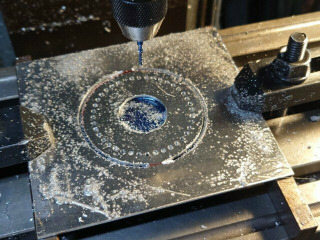
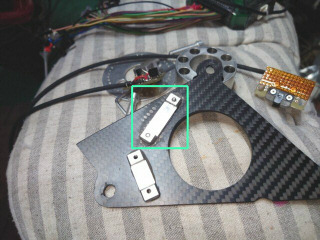
取り付け穴はまだですが、バリをとって完成しました。手前は今まで使っていたモジュール1.5の36歯平歯車を加工した非接触回転速度センサ用です。

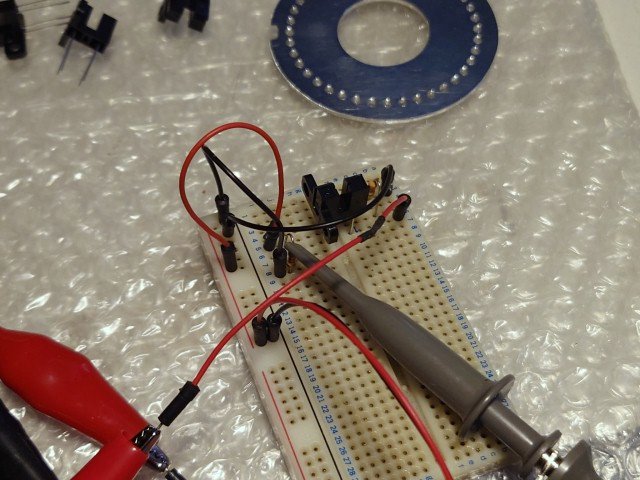
フォトインタラプタを選別します。コレクタ電流の大きいものを集めます。
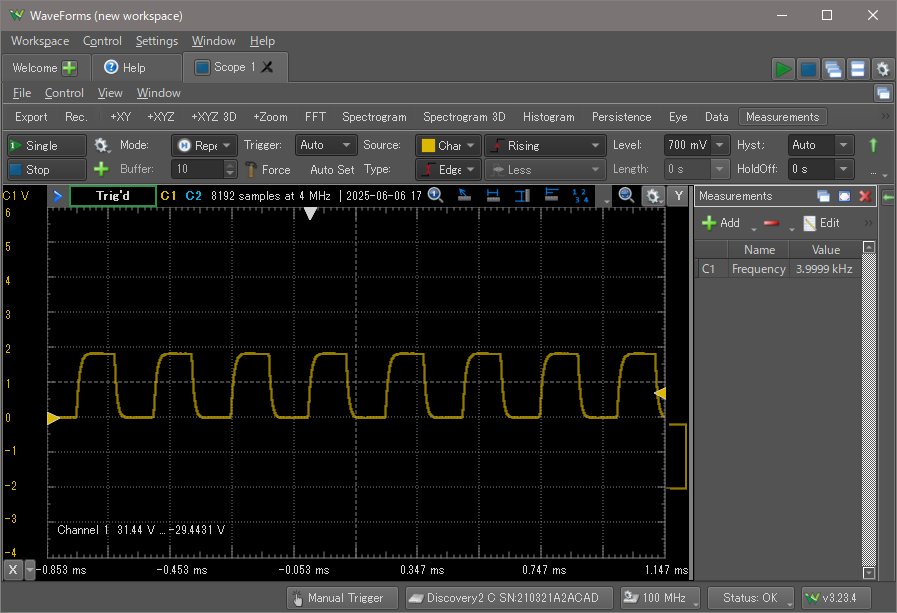
LEDをアナログディスカバリのジェネレータでパルス駆動して、フォトトランジスタの応答速度を確認します。スペック上は5uSecです。エンジンの上限回転数を11000rpmとすると、カムは5500rpmで回ります。周波数だと92Hzです。40歯なので約3.7KHzになり、4KHzで実験しました。
6月7日
モノタロウで10mm厚のポリカーボネイト板を購入しました。フォトインタラプタは懐が浅いので改造します。ポリカーボネイトは130℃くらいまで耐熱性があります。

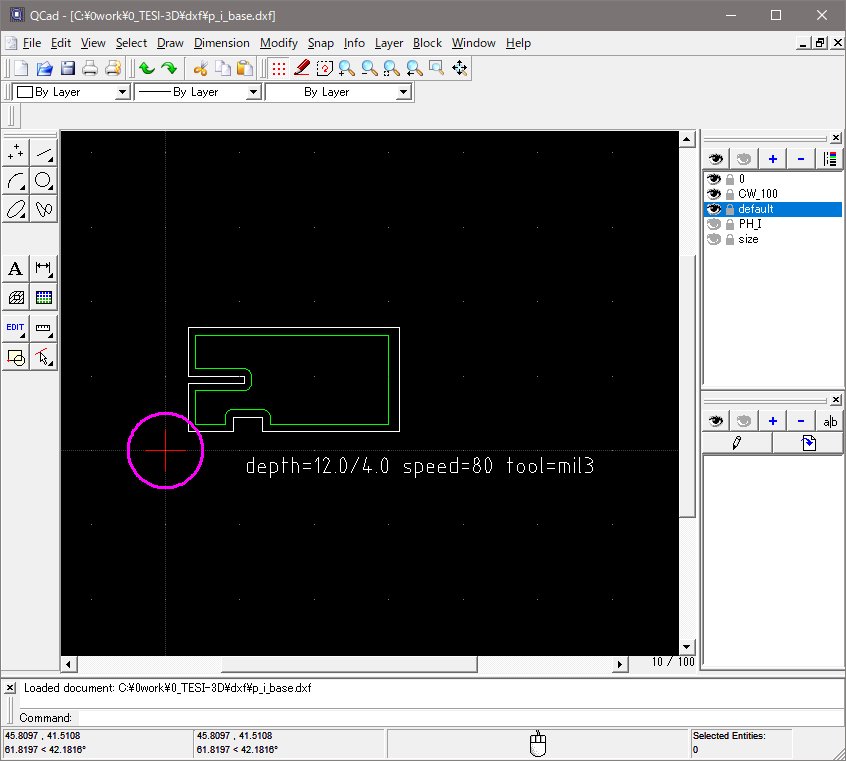
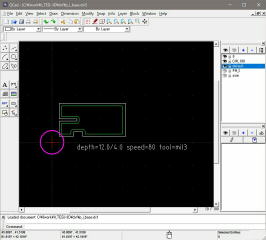
プライマリパルス用のポリカーボネイト板でフォトインタラプタを挟む補強板を作製します。基本形の図面をQcadで入力します。
3mmのエンドミルで切り出し、補強板を2個作製しました。

細かい形状は手動で切削して、フォトインタラプタを挟む構造にします。トランジスタのバッファを乗せる、ユニバーサル基板も作製しました。ユニバーサル基板は取り付け部も兼ねています。

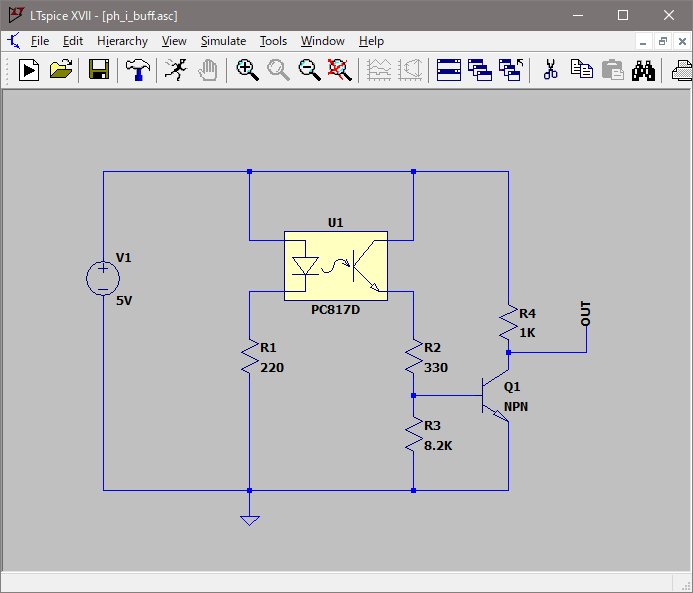
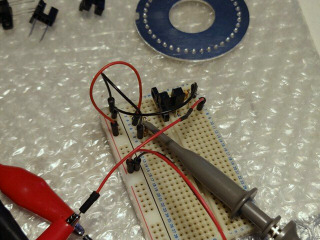
オムロンのサイトを参考に、手持ち部品でバッファ回路を作りました。U1のフォトインタラプタは仮で、実際には秋月で購入したものを使います。
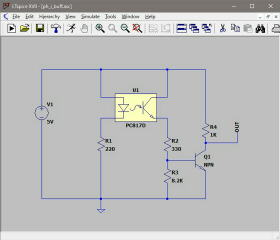
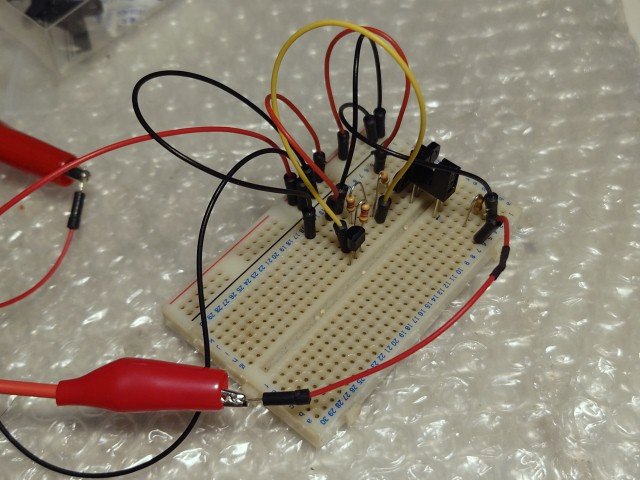
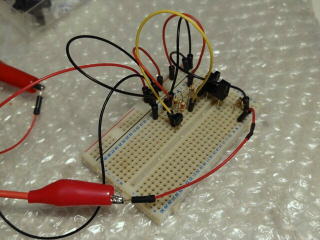
バッファ回路は実験して動作確認しておきます。
6月9日
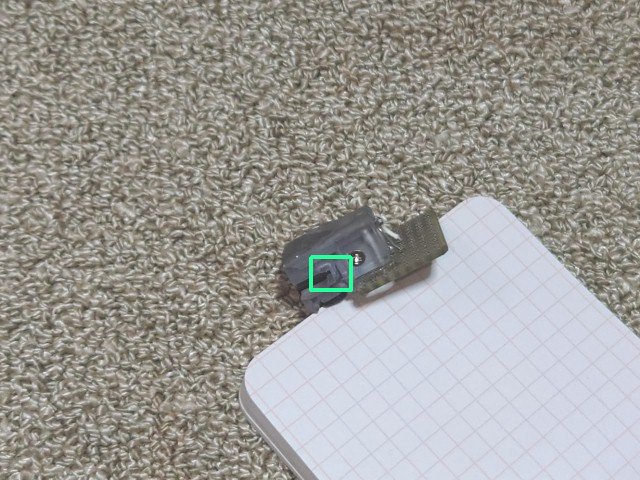
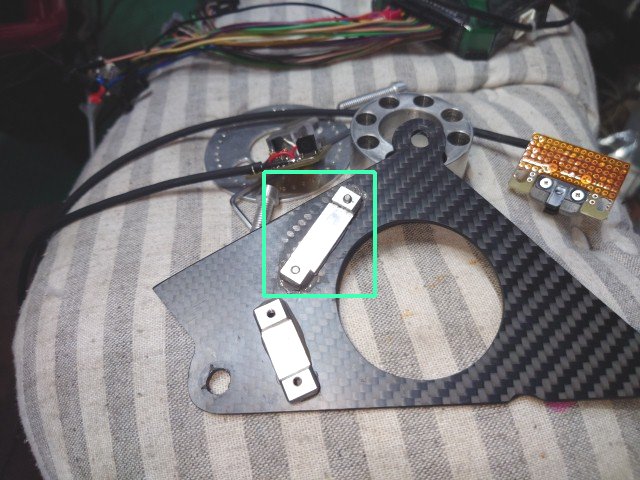
プライマリパルス用のフォトインタラプタの続きです。ポリカーボネイト板で挟んでフォトインタラプタをエポキシ接着剤とネジで固定して緑枠の懐を1.5mmほど深く加工しました。

上部はエポキシ接着剤を盛って補強しておきます。
バッファ回路を追加して、動作確認を行いました。動作良好です。

6月10日
続いて、セカンダリパルス用を作製します。ポリカーボネイトで固定部品を作製しました。


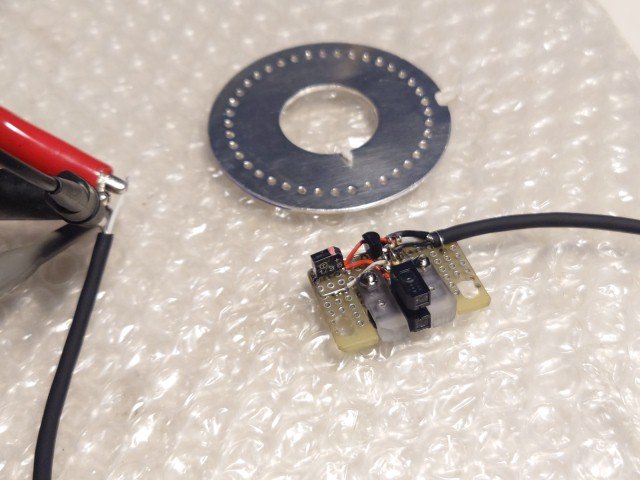
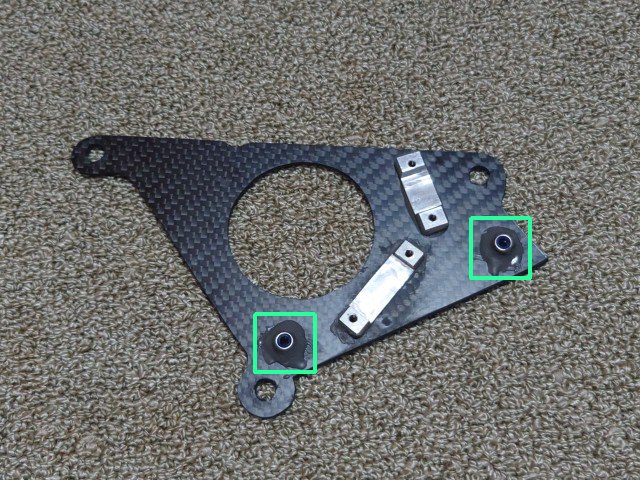
ユニバーサル基板にフォトインタラプタを固定しました。セカンダリパルスは取り付け幅が広くなったので、カーボンのベース板の裏に取り付ける、プレートナットも作り直しました。

セカンダリパルス用もバッファ回路を追加して、動作確認を行いました。動作良好です。
6月11日
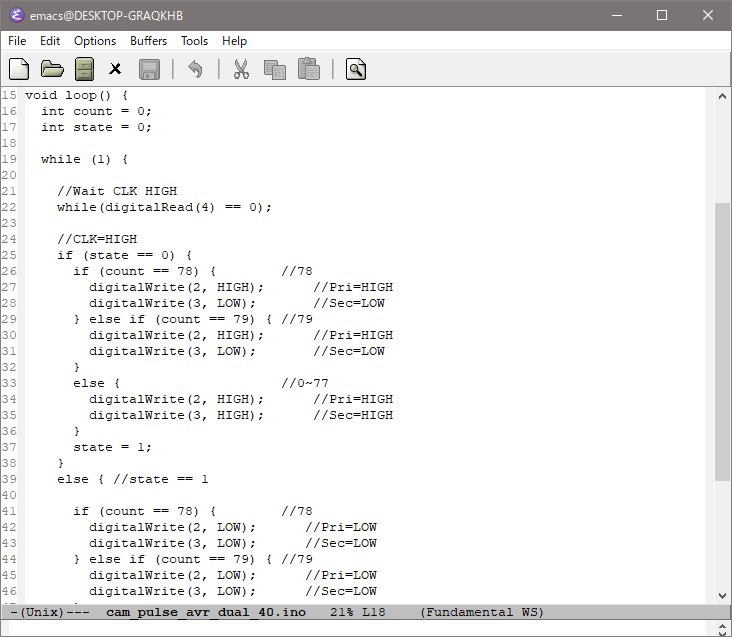
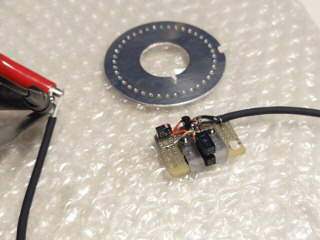
エンジンエミュレータの疑似パルスを40歯デュアルホイールに変更しておきます。疑似パルスはアルドウィーノUNOで出力しています。プログラムのロジックを忘れていて、思い出すのに時間がかかりました。ホイールを模して、プログラム修正しました。

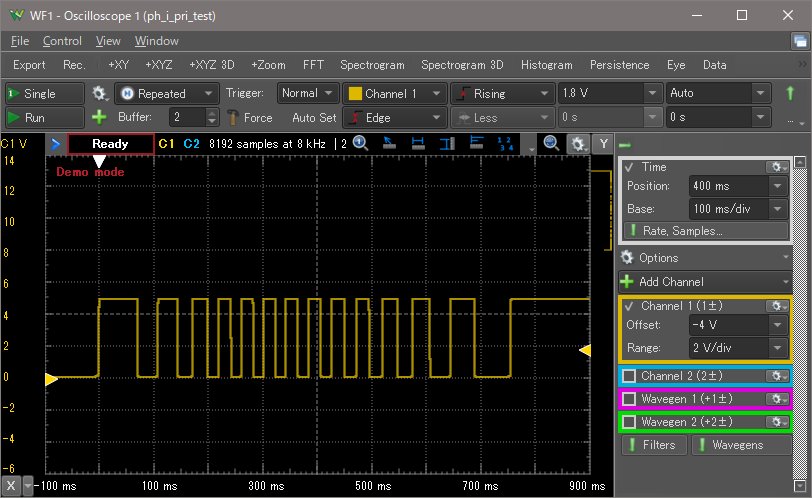
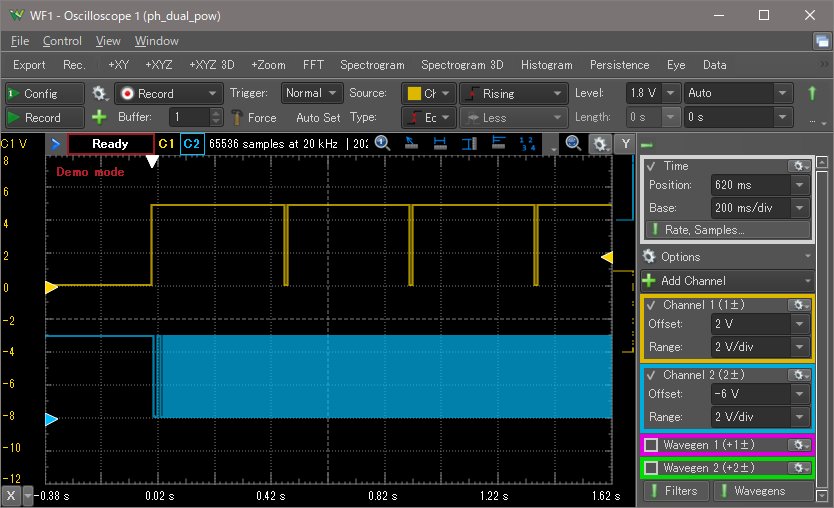
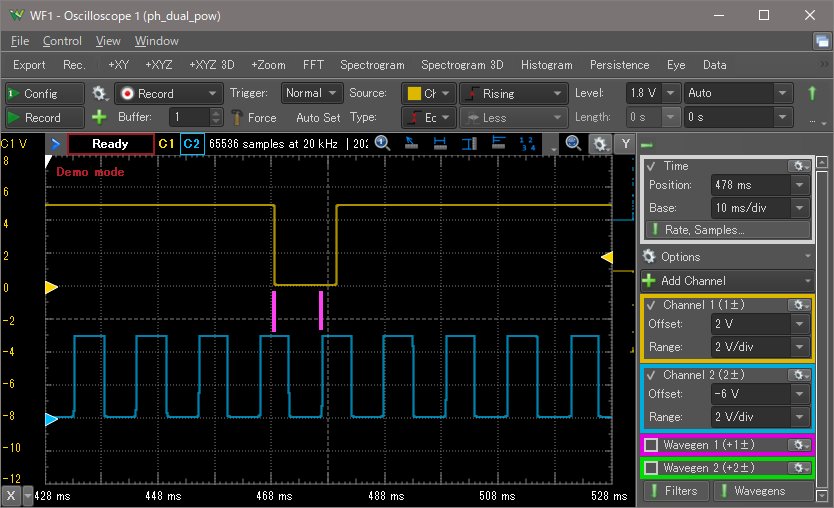
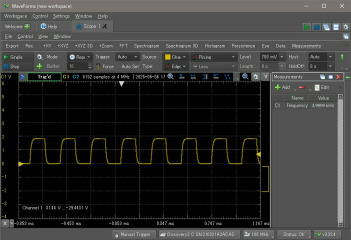
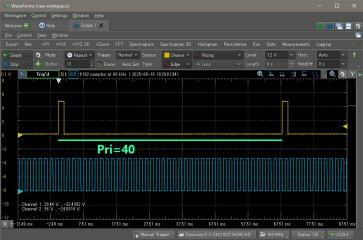
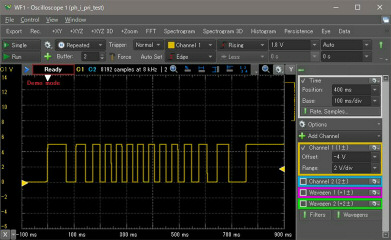
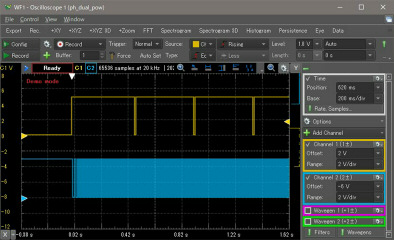
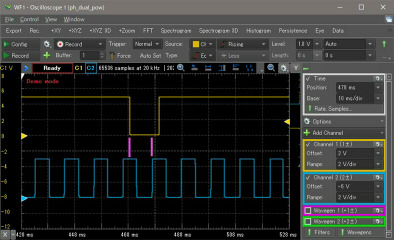
早速、STM32ボードのポートの入力端子にオシロスコープを繋げて動作確認します。タイミングはプライマリパルスが40パルス、セカンダリパルスの幅はプライマリパルス1パルス幅分です。レベルはトランジスタのバッファで反転し、その後、ヒステリシスコンパレータで再度反転するので、光が通過するとロジック1を出力します。良いようです。
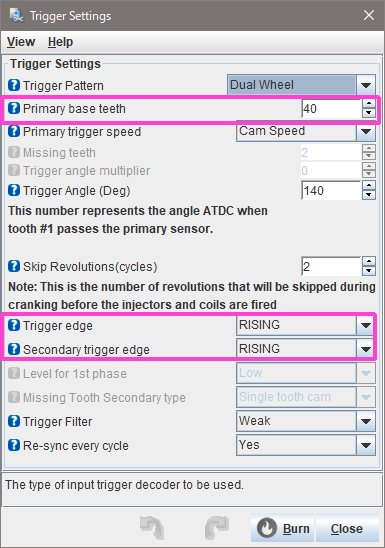
TunerStudioのトリガセッティングも40歯にエッジも変更しておきます。

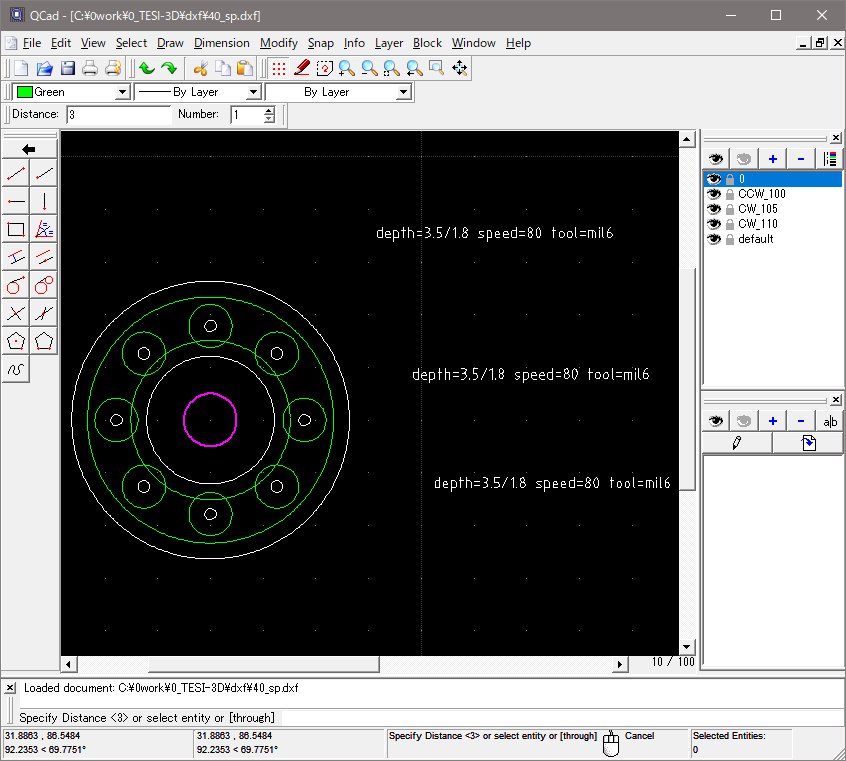
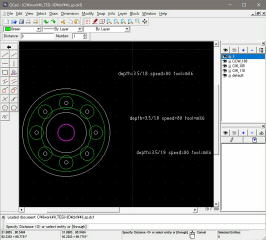
フォトインタラプタをホイールに挟むためのかさ上げスペーサの図面をQcadで作製しました。
あらかじめ3mm厚のアルミ板を2.5mmまで薄くしてから、CNCフライスで切削しました。

タイミングベルトのドライブプーリに作製したスペーサを入れます。寸法は良いようです。

既存スペーサを重ねて、カーボンのベース板からの高さを測ります。5.1mmになりました。フォトインタラプタの隙間まで4.5mmなので、後はシムで調整します。


6月14日
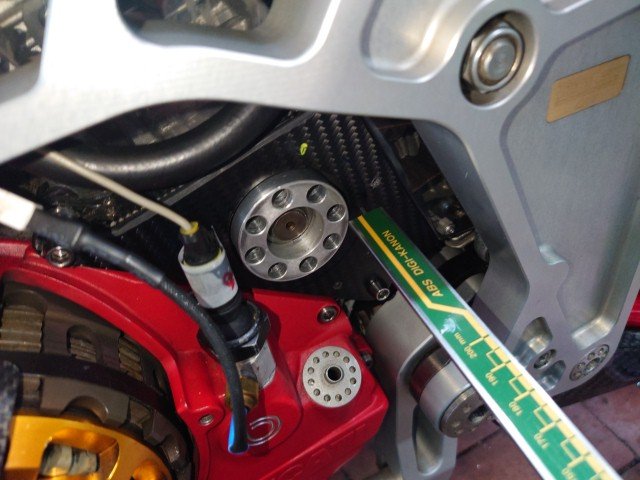
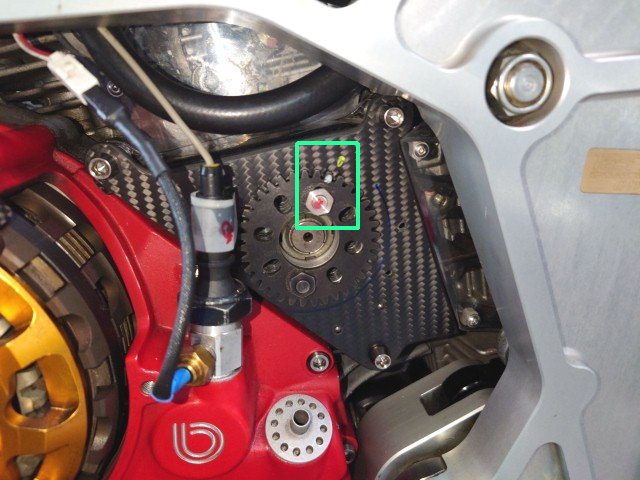
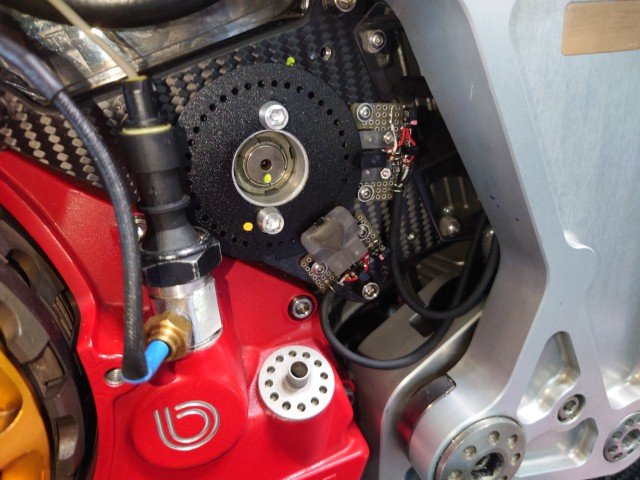
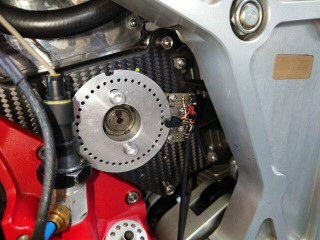
40歯のフォトインタラプタのホイールを取り付けます。はじめに非接触回転速度センサ用のホイールに戻して、ベルトドライブプーリを上死点の位置に合わせます。
上死点では垂直、水平気筒のマーカが一致します。
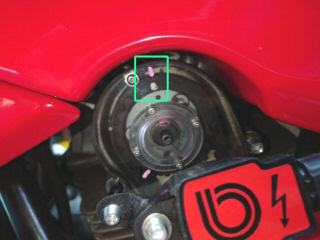
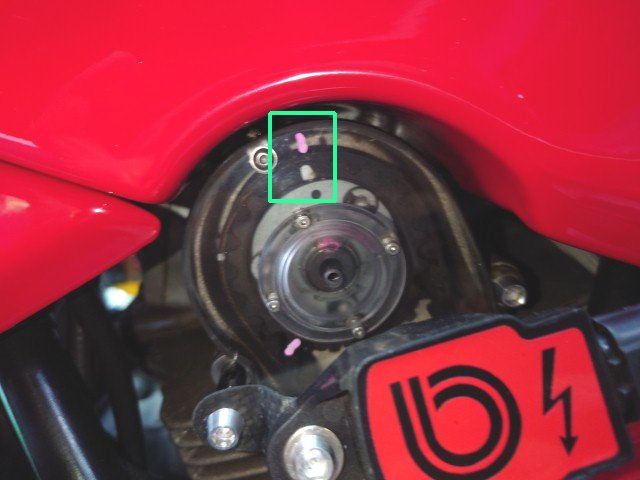
その後、セカンダリパルスが発生する位置まで回転させます。
40歯用のホイールに固定用の穴開けて、上記の位置で固定しました。

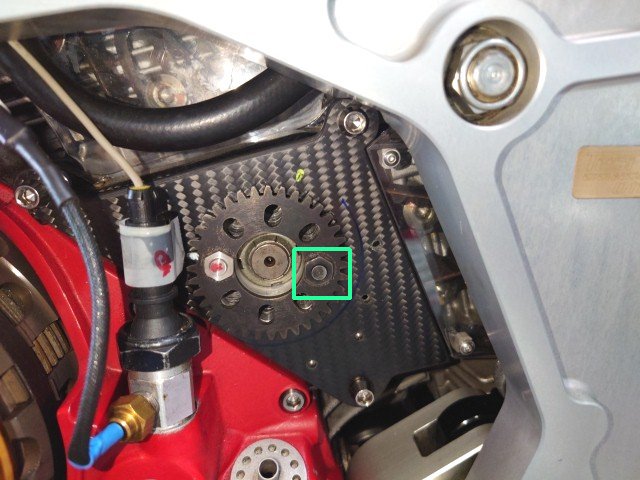
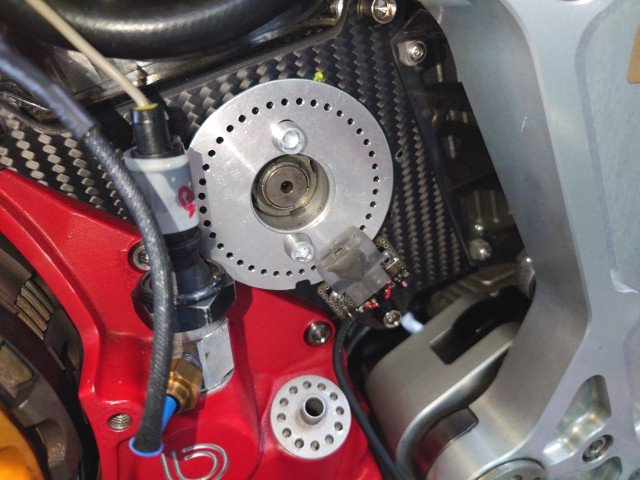
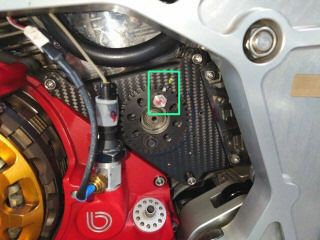
プライマリパルス用のフォトインタラプタを仮止めします。

プラグを外してギアを入れてタイヤを回します。フォトインタラプタの出力をオシロスコープで確認しました。良いようです。
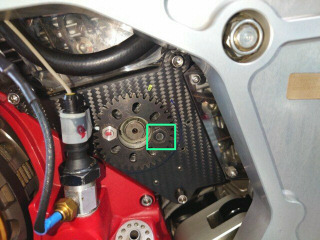
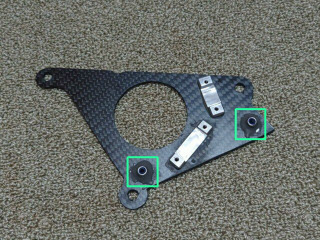
セカンダリパルス用のフォトインタラプタを固定するプレートナットをベース板の裏に耐熱エポキシ接着剤で固定しておきます。
6月15日
セカンダリパルスの固定位置を調整します。
プラグなしでセルモータでクランキングして、バッファ出力をオシロスコープで確認します。良いようです。

続いて、プライマリのセンサも取り付けます。

同じく、プラグなしでセルモータでクランキングして、バッファ出力オシロスコープで確認します。
セカンダリパルスの前後で拡大します。センサの出力はヒステリシスコンパレータで反転されるので、基準はセカンダリの立ち上がりの後のプライマリの立下りで良さそうです。
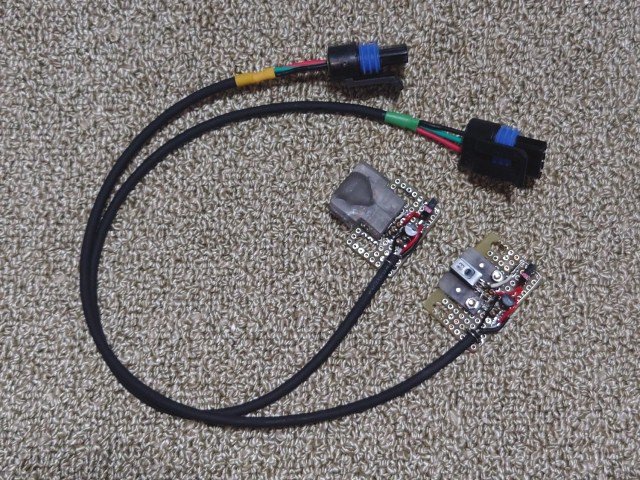
センサのケーブルにコネクタを取り付けました。
6月16日
ホイールに乱反射防止の90度のサラ加工して、サンドブラストしました。

その後、艶消し黒で塗装しました。

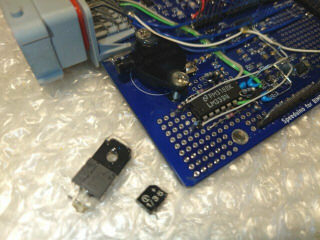
ベースボードのセンサ用電源は非接触回転速度センサ用に9Vになっているので、3端子レギュレータを外して、5Vに変更しました。これでベースボードのコネクタに出ている電源は全て5Vになりました。非接触回転速度センサ用の120Ωの負荷抵抗は取り外しておきます。
6月17日
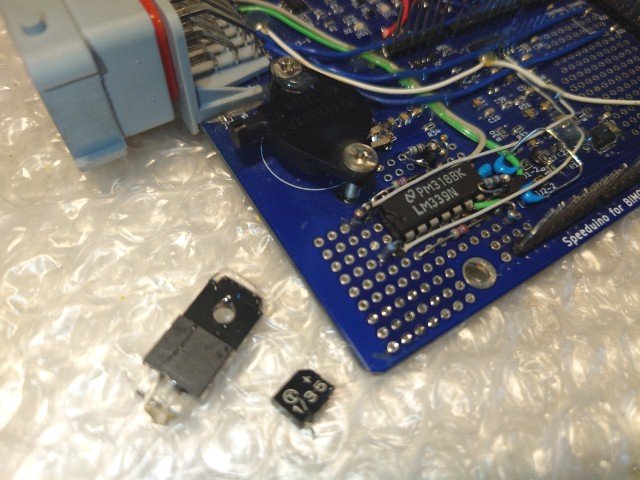
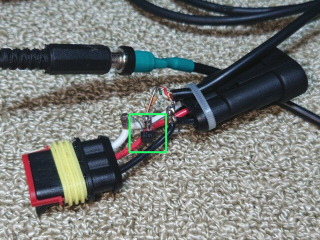
ダイレクトイグニッションにするとタイミングライトのセンサトランスをハイテンションコードに挟めなくなります。タイミングライトの先端のセンサトランスの代わりに5Vの点火パルスを入力してもライトは光りますが、立ち上がりで光り、ロジックが反転しています。はじめに、センサトランスが切り離せるようにコネクタを接続します。

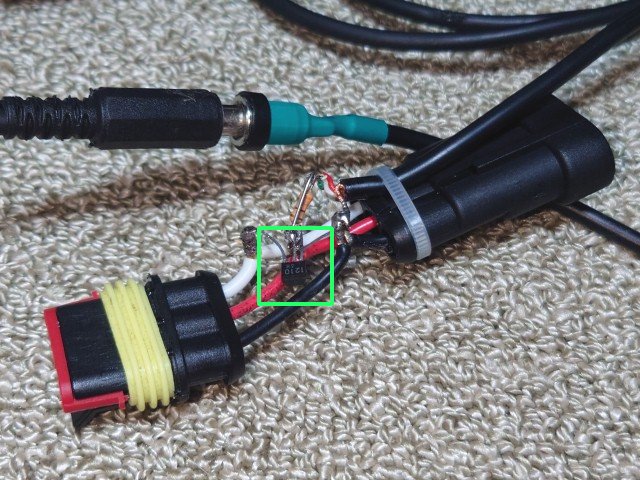
点火パルスの分岐コネクタにデジトラを入れてパルスを反転します。これをセンサトランスの代わりに接続すれは点火パルスの立下りでタイミングライトが光り、タイミングが見られるはずです。
6月18日
不用意に外来光で乱されないように、フォトインタラプタの遮蔽板を作製します。GaAs赤外線LEDの波長は930〜1000nm付近で、この波長を遮断できる透明の材料は一般的ではないようです。本当は外から見えた方がメカメカしくて良いですが、ここはカーボンケブラーで遮蔽板作ります。ケブラー繊維は普通のはさみでは簡単には切れないです。

アルミ板に離型ワックスを塗って型にします。

耐熱性のポリエステル樹脂を使って、ケブラー入りカーボンと普通のカーボンを2層で積層しました。
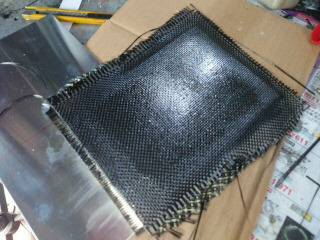
役所に用があって帰ってきたら、もう硬化していました。早速、離型しました。

午後になってガレージ内は40℃に近くなっています。暑いです。

型紙を作って〜

型紙に合わせて外径を加工しました。

固定ボルトは4mmを使います。アルミ棒から、高さ14mmのステーを2個作りました。

6月19日
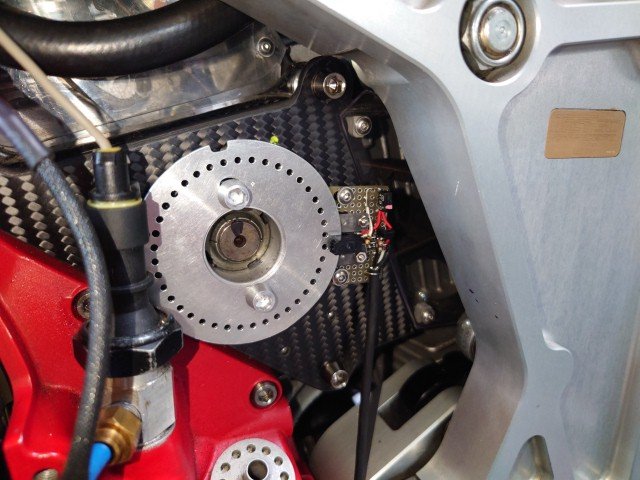
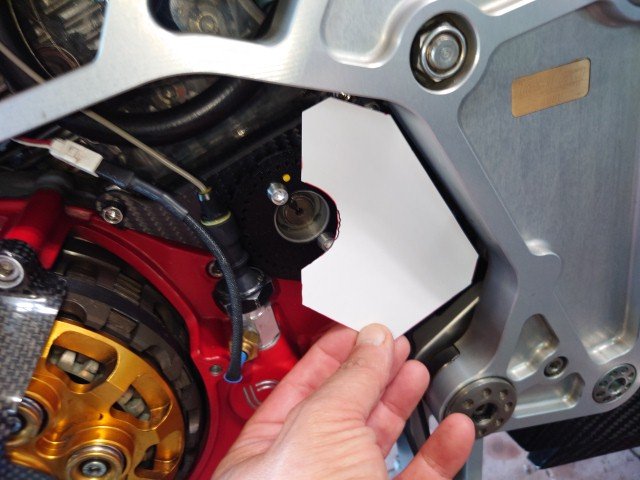
遮蔽板の続きです。固定用のナイロンナットをベース板の裏に付けて、仮止めしてみました。

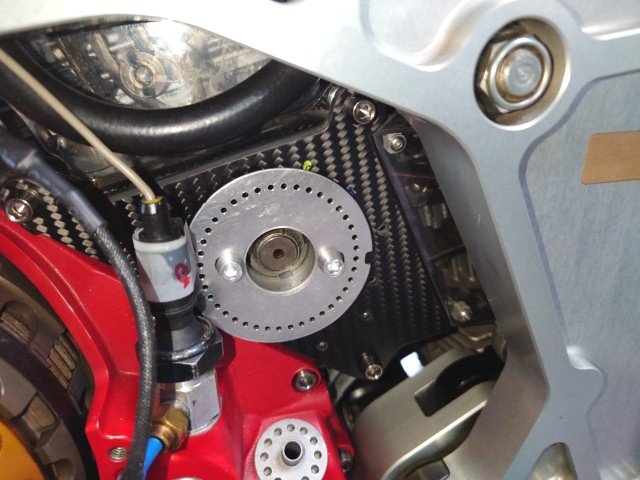
ベース板とセンサを車体に戻します。良いようです。後で、固定ボルトを10度加工します。