XYZテーブルを3Dプリンタに改造する
第3回目
昔、もらったCNC-XYZテーブルを3Dプリンタに
改造していきます。
2014年
7月12日
部品を購入しました。ヤフーの
ショップ
で見つけたExtruder用
ギア
。ステンレス製ですごく作りがいいです。ぱっと見ただけでも、食い込みが良さそうなのが分かります。
こちらはヤフオク。D−SUB25ピンの
コネクタ
と
フードキット
。
アマゾンのArduinoの
拡張ピン
。
ヤフーショップの10mm厚の本物の
コルク板
(笑)。
モノタロウのタカチの
アルミケース
。
ヤフオクのショップの
放射温度計
。
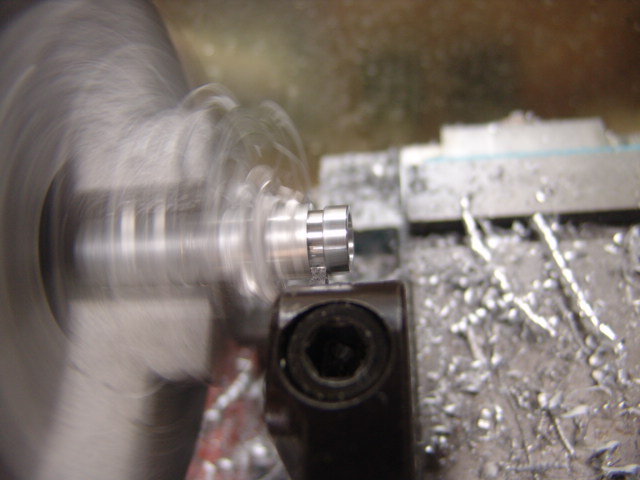
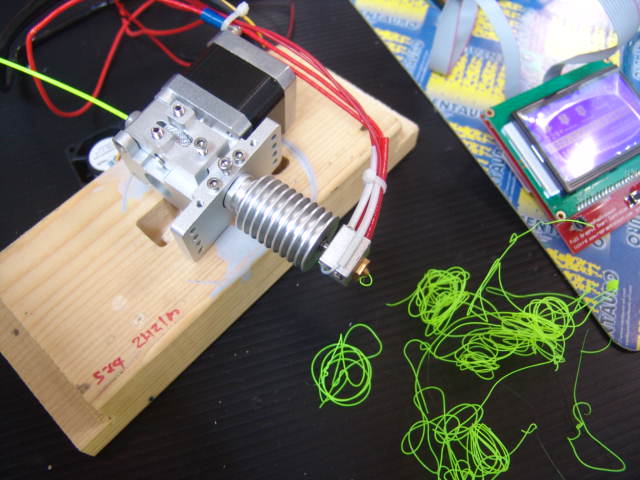
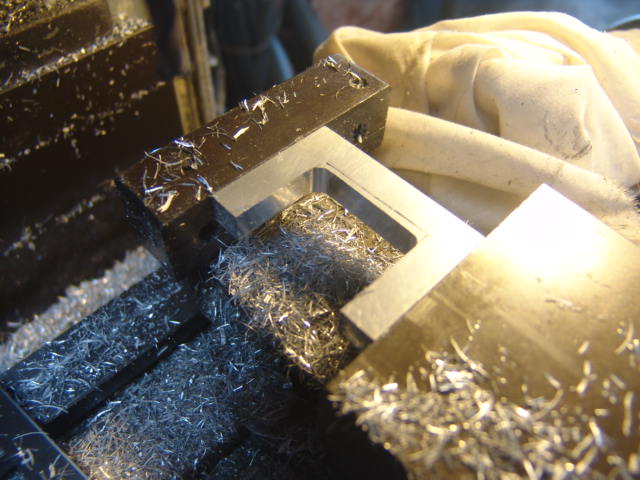
購入したギアは
凹型
なので、
平坦
なアイドラを作製します。2017材を旋盤で削ってローレットを付けておきました。右の左からベアリング、新規作製のアイドラ。もともと付いていたもの。
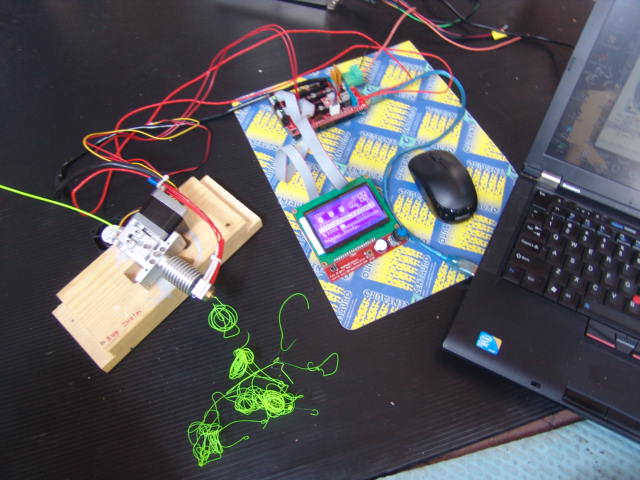
早速、試してみます。
Extruder用のサーミスタコネクタに半個を付けておいて、加熱しなくても操作ができるようにしておきます。
滑っている感じはしません。
全然違います。
調子いい
です。
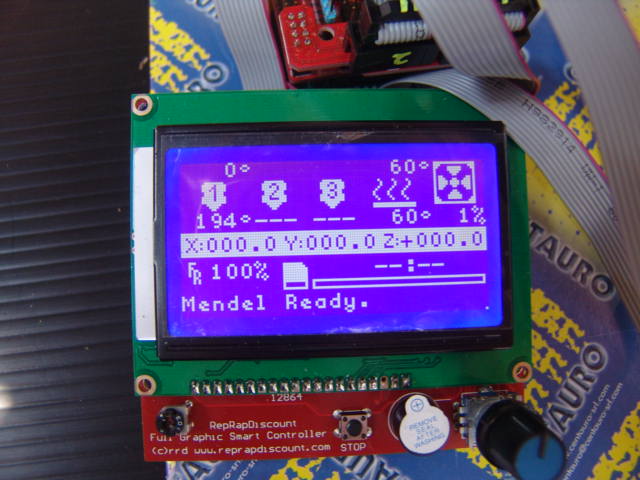
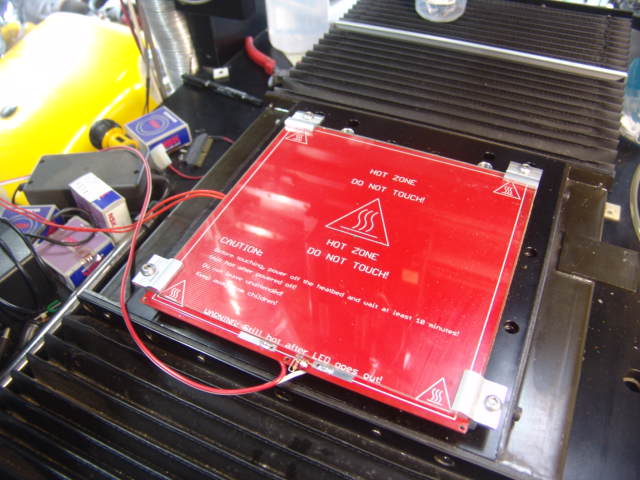
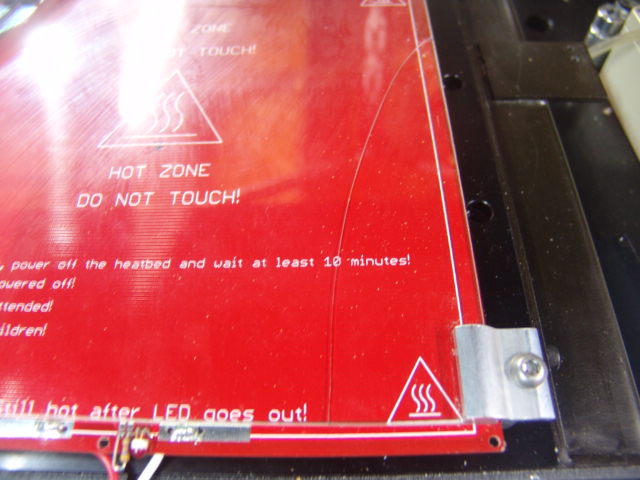
放射温度計のテストも兼ねて
ヒートベッド
のテスト。
はじめにPLA用の60℃。
58℃
で測れてます。
続いてABS用の110℃。
108℃
でちゃんと測れてます。
ヒートベッドをコルク板に固定するために、ポリイミドテープで
サーミスタ
を固定し、ケーブルを
延長
します。
コルク板に
溝
を入れます。
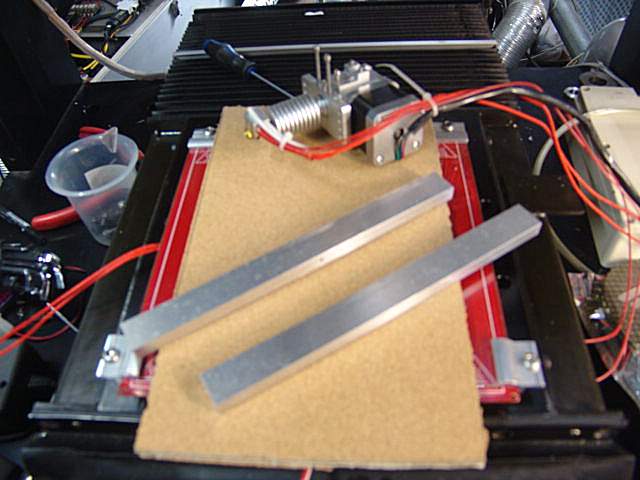
テーブルに固定する
ステー
を作製します。
テフロン樹脂
が余っていたのでこれを使います。フライスで溝を切ります。
固定ステー
完成
。裏側に3mmのタップを立ててネジで押して固定しますがコの字の部分が薄くて、ガラスとテフロンの摩擦が少ないため、イマイチちゃんと
固定できません
(笑)。
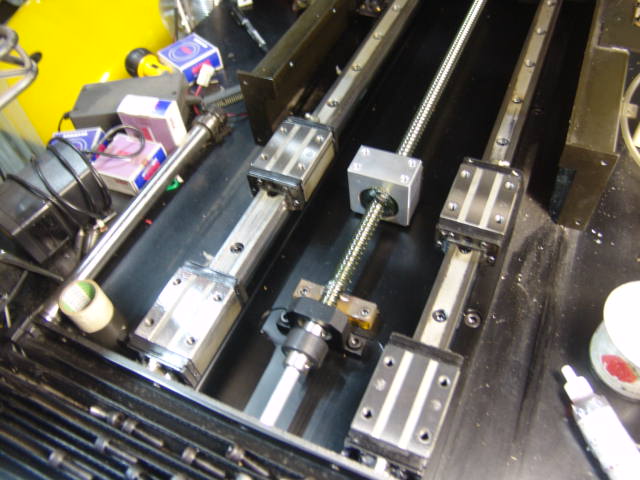
ステーの固定穴を開けるために、一度、
天板
を外します。リニアレールのスライダが出てきます。
天板に6mmの
タップ
を4箇所立てました。
7月13日
やはり、テフロン製のステーが
イマイチ
なので
アルミ
で作り直しました。使ったのはシビック用のインジェクションの
デリバリパイプ
。寸法が丁度良かったです。
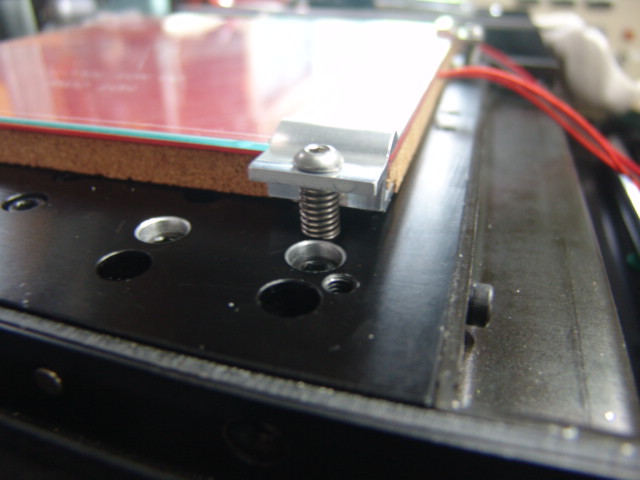
早速、組み立て。先週購入してあった
押しバネ
を挟んで取り付けします。今度は
良く
なりました。ガラスー>ステンボルトー>天板と熱が逃げて行きそうなので、
樹脂ボルト
があると良いです。
こちらもヤフオク購入品。AWG26の
線材
。長さ10mm。
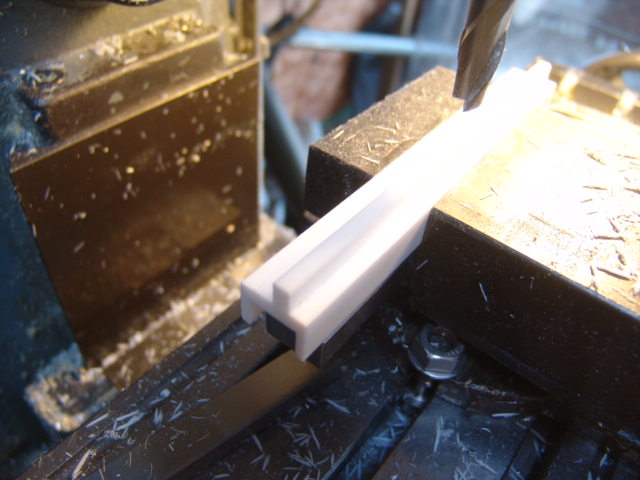
ExtruderをZ軸と固定する
ステー
の作製を開始しました。10mm厚のアルミ板から
240mm
の棒を切り出します。
幅
25mm
長さ240mmの2本切り出し
完了
しました。
7月18日
Ramps1.4から既存の
モータドライバ
に配線を接続する準備です。まず、MEGAに載っているCPUのポートから直接フォトカプラの
LED
を駆動できるか確認します。仕様書から、吸込み側も出しと同じく20mAまでです。これならLEDを
駆動
できます。次に合計の電流ですが、ポートのグループ毎に決まっています。Ramps1.4の各信号がCPUのどのピンに繋がっているのか調べる必要があります。Ramps1.4の回路図は
ここ
です。MEGAの回路図は
ここ
で す。ん〜これ、どこの信号がどこに配線されているのか非常に分かりずらいですね。Rampsの方はMEGAConnという1つのコネクタのように書いてあ りますが、実際には周囲に配置されている複数のコネクタです。形だけでなく信号線名も対応が付きません。WEBを調べているとこんな
ページ
がありました。このページのMappedPinNameの所の
デジタル
と
アナログ
というのがMEGAConnの
Dxx
と
Axx
に対応しています。3つの資料を見て、追っていくと、どこがどこに繋がっているか分ります(笑)。そこで調べると合計で
100mA
まで流せるFとKポートとに
6本
繋がっていました。全部で9本必要ですが、6本が100mAの
このグループ
に集中してました。他に200mA流せるグループもあります。ちょっと
分散
させたくなります。そこで、Marlinのpin.hファイルを覗くとピン定義が数字の連番になってます。既存の配線から追っていくと、D00=0でD53まで行き、その後A00=54で69まで対応していることが判明。
Extruder
のモータと
Y軸
モータを
入れ替
えるとうまく分散させられます。オープンオフィスのCALCで
表
を作っておきました。
7月19日
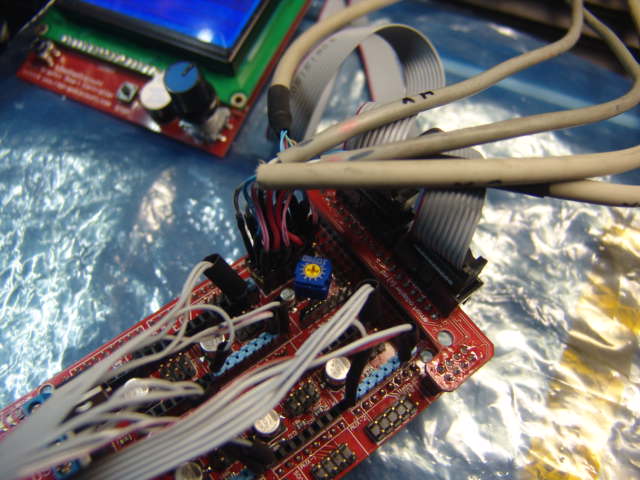
既存のモータドライバと制御ボードを接続しま す。RAMPSのモータドライバへ接続されている
DIR
、
STEP
、
ENA信号
を引出して既存のモータドライバと接続しま す。上の表のようにE1とYを入れ替えています。Printrunから移動テストを行いましたが
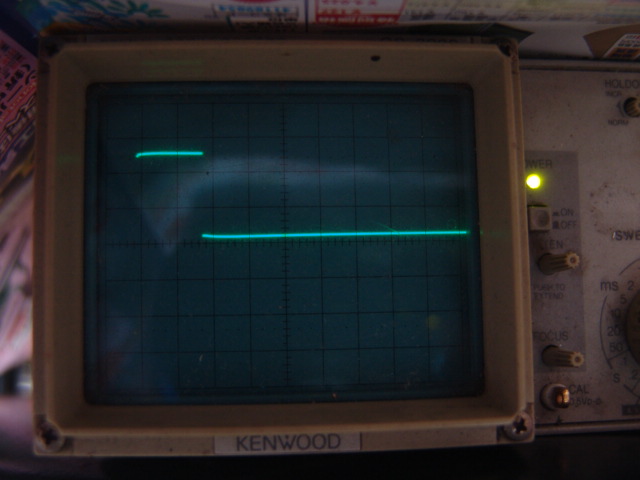
STEP信号
が正しくモータドライバに送られていないようで、モータは動きません、モータドライバのインジケータも点灯してません。オシロ でSTEP信号を見ると幅が
約2μSec
で
細すぎ
でした。普通のTLP521タイプの
フォトカプラは
立ち上がり下がりとも
2μSec
くらい 必要なので2μではダメです。
信号がフォトカプラを通過して来ないよです。
ちょっと
臨時
で動かすために
STEPER.CPP
を修正して
パルス幅を広くしました。
20μSec
くらいの幅にしてみます。
ソフトタイマ
を入れただけなので、全体の動作に関係しているかもしれません。あくまでも臨時です。
///////////////////////////////////////////////////line 36
// add Jun
volatile int stepw;
//#define STEPWAIT //30 pulse width 14uSec
//#define STEPWAIT //40 pulse width 18uSec
#define STEPWAIT 45 //pulse width 19uSec
//#define STEPWAIT 50 //pulse width 20uSec
///////////////////////////////////////////////////line 525
#if !defined COREXY
counter_x += current_block->steps_x;
if (counter_x > 0) {
WRITE(X_STEP_PIN, !INVERT_X_STEP_PIN);
for (stepw=0; stepw<STEPWAIT; stepw++); // ADD Jun
counter_x -= current_block->step_event_count;
count_position[X_AXIS]+=count_direction[X_AXIS];
WRITE(X_STEP_PIN, INVERT_X_STEP_PIN);
}
counter_y += current_block->steps_y;
if (counter_y > 0) {
WRITE(Y_STEP_PIN, !INVERT_Y_STEP_PIN);
for (stepw=0; stepw<STEPWAIT; stepw++); // ADD Jun
counter_y -= current_block->step_event_count;
count_position[Y_AXIS]+=count_direction[Y_AXIS];
WRITE(Y_STEP_PIN, INVERT_Y_STEP_PIN);
}
#endif
///////////////////////////////////////////////////line 593
counter_z += current_block->steps_z;
if (counter_z > 0) {
WRITE(Z_STEP_PIN, !INVERT_Z_STEP_PIN);
for (stepw=0; stepw<STEPWAIT; stepw++); // ADD Jun
#ifdef Z_DUAL_STEPPER_DRIVERS
WRITE(Z2_STEP_PIN, !INVERT_Z_STEP_PIN);
#endif
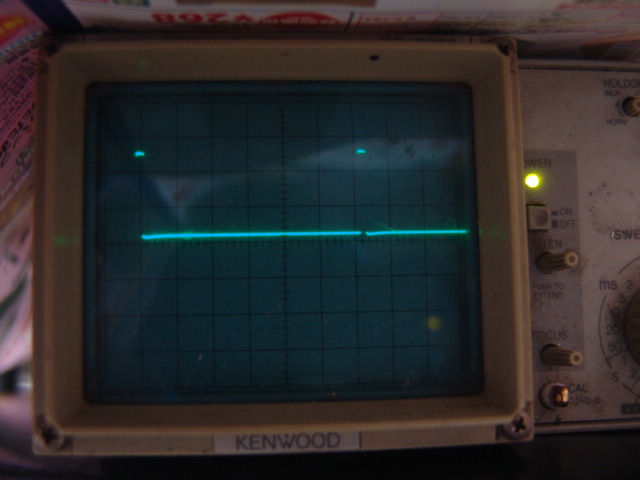
以下、STEPの波形です。
約2μの幅が上記により
20μ
くらいになり、
3軸
とも
正常
に動くようになりました。まだ、リミットスイッチが接続されていないのでホームボタンを押すと端に
ぶつかり
ます(笑)。
モータ自体は正常に動くようになったので、Arduinoの
拡張ピン
を使って
リミットスイッチ
を
接続します。以前に調べた、
Z軸
の磁気の
近接センサ
の
赤:電源、
白:GND、黒:OC出力
は間違いでした。
赤:電源
、
白:
OC出力
、
黒:
GND
が正解でした。
リミットスイッチの調整をしている時に
ガラス
に手をついたら
割れ
ました(泣)。手前からX軸まで奥行があるので作業するのに疲れます。
7月20日
ガラスを再度、
切り出し
ました。ダイアモンドのやすりで
面取り
をしておきます。
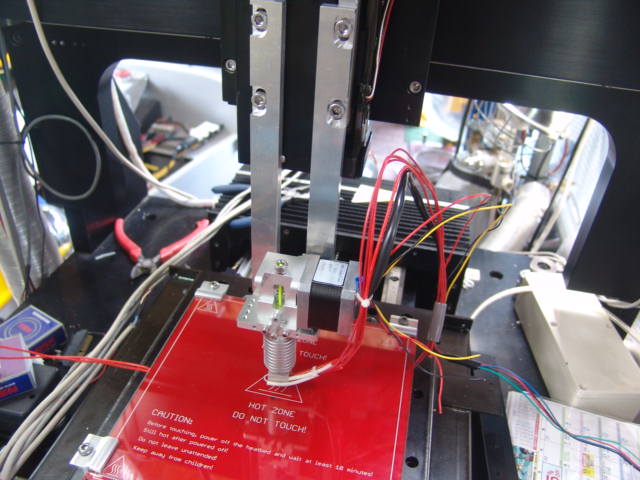
先週作製したExtruder用
ステー
をZ軸に取り付けました。
Extruder用の
コの字金具
です。10mm厚のアルミの端材から
手動
で切り出したました。その後、
穴あけ加工
を行います。
Extruder
を
コの字金具を介してステーに
仮止め
してみました。
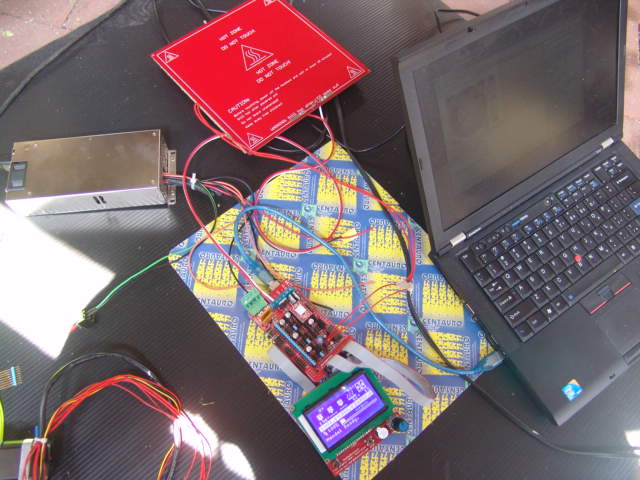
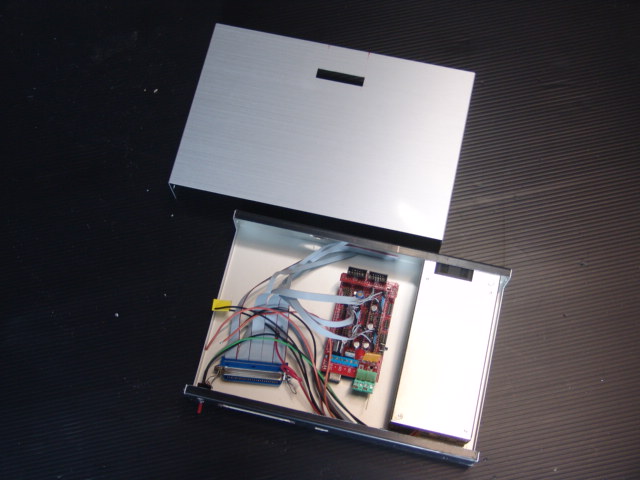
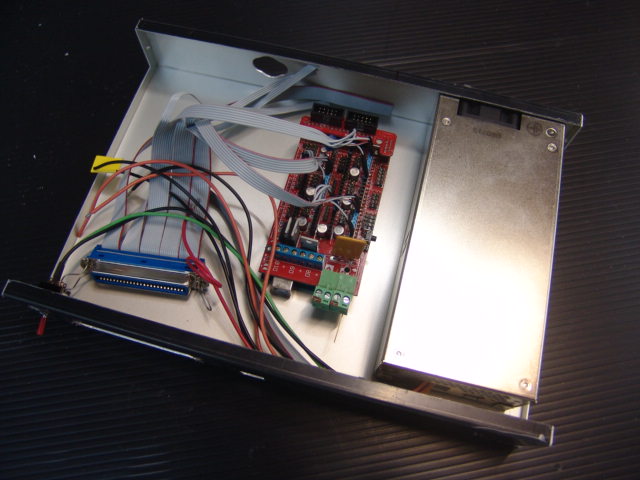
制御基板を
ケース
に入れます。中央に
制御基板
、右側が
電源
です。上部の穴はLCD/SDカード/スイッチを接続する10ピンx2のコネクタ接続用です。ソフトウェアタイマで幅を長くしているSTEP信号は
ワンショット
か何かで幅を長くする予定です。その基板も追加で筐体内に入れる必要があります。
前面は
電源スイッチ
とモータドライバに接続する
50ピンアンフェノールコネクタ
。PCに接続する
USBケーブル
の取り出し穴です。裏側はAC電源、リミットスイッチ用の穴。まだ、電源用の空気取り入れ穴が
不足
しています。
テーブルの裏側です。リミットスイッチの配線は
コルゲート
に通してまとめておきました。