セミ・オートマチックへの道
2001年1月9日
セミ・オートマチックへの道
2001年1月9日
頼んでいた、部品が揃いましたので紹介します。
リニアスライドは会社の廃棄品ですが、それ以外は全て新規に購入しました。ギア関係はいつもの
二光精機にお願いしました。モータやエンコーダは
ネットから通販で購入しています。
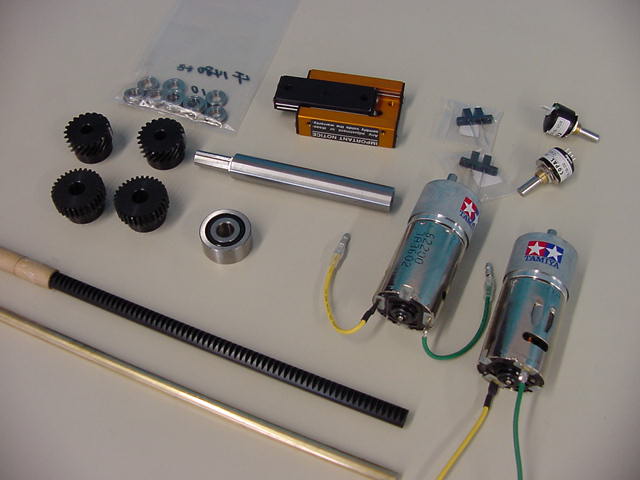
以下が調達した部品です。左上から右下にかけて、保持用ベアリング、リニアスライド、フォトインタラプタ、ロータリエンコーダ、スパイラルギア、6角スライド、DCギアモータ、平歯車、スラスト荷重を受けるアンギュラベアリング、ラックギア、真鍮棒で
す。ラック用のギアは撮り忘れています。 モータは減速ギア内蔵のタミヤのRS540ベースのモータです。
モー
タのページはここ。
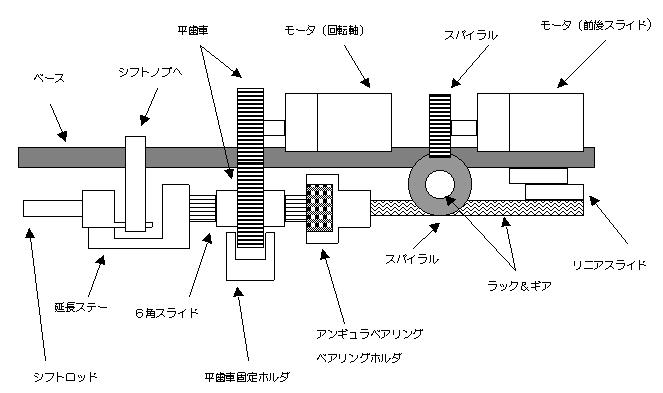
概略の機構図を書いてみました。基本的にはDCサーボモータで
回転軸と前後スライドを動かして、スムーズにシフト可能か実験します。サーボ用のロータリエンコーダと初期位置検出用のフォトインタラプタは
書いてありません。左側の平歯車は回転動作を行い、6角スライドとア
ンギュラベアリングによって、回転軸と前後のスライドはフリーになっています。右側のスパイルギアでラックを動かし、前後にスライドさせます。
概略図は位置関係や寸法は適当です。
問題点として、回転方向をセンタに戻すスプリングがミッションの後ろの
アルミケースの中に入っています。このスプリングのテンションによって2−3速の位置にシフトノブが戻ってくるようになっています。モータによって回転軸を回す場合にはこのテンションは当然負荷となります。この時には6
角スライドにも摩擦が生じて前後スライドの負荷にもなります。本来であれば取りたいの
ですが、当然ミッションを下ろさないと外せません。ミッション単体で実験する場合は半バラ状態なので、このスプリングは外せるのですが、実際に車に搭載する場合にミッションを下ろすのは、ちょっと気が引けます。前後スライドの位置決めはミッションケースの左前にノッチとボールが
あり、このボールはミッションを載せたまま、直ぐに取り外す
ことができます。
<次回は試作の製作過程を紹介します>