アルドウィーノを使った
アルドウィーノを使った
オープンソース、オープンハードの
ローコストECU
テージのECUが壊れているみたいなので
Speeduino(STM32)に装換しました。
その31:
燃調の調整
メンテナンス
2025年
11月4日
前回のログ解析から燃調マップを手動で修正して、再度、高速でログを取ります。お昼少し前に出発、嵐山小川から鶴ヶ島まで高速に乗り、クック―Y到着しました。

買い物の後で、東松山経由の下道で帰還しました。早速、高速のログ解析します。緑枠はちょっと薄い所です。下の赤グラフはEGO補正で均一に交番していない所は補正しきれてない所です。上側に寄っている場合は薄いことを表します。

ヒストグラムで確認すると、116%に補正していますが、補正しきれていないようです。また修正して試走します。

11月8日
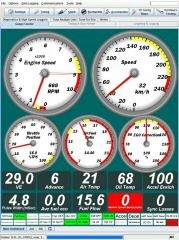
前回、TunerStudioのGPS速度計の反応が遅かったので、設定ツールで$GPGGAと$GPRMCメッセージだけを出力するようにして試走しましたが、変化無しでした。このモジュールはデフォルトで多くの別メッセージを出力しています。試しに設定ツールで速度を表示しても、同様に反応が遅いです。一応動作はしているのですが、例えば、停止しても少しづつ表示が少なくなり、10秒くらいで0になる感じです。初めの動作確認では普通に反応してたと思います。

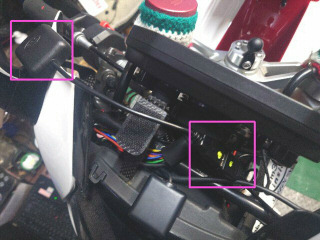
GPSモジュールがETCアンテナの直ぐ横にあるので、ETCカードを抜いて、ETCアンテナにアルミホイルを被せて設定ツールの動画キャプチャを取りましたが、やはり反応が遅いです。赤枠は設定ツールの速度計です。停止しているのに速度が0にならず、少しづつ減っていきます。クリックすると短い動画をダウンロードします。

11月9日
念のため、追加で発注しておきました。

11月13日
2台目のGPSモジュールが届いたので、早速、動作確認します。USBケーブルを60cmに短くして、タブレットとモジュールを自転車に取り付けました。

設定ツールで速度を表示して、走行/停止が遅延なく反応をすることを確認しました。クリックすると短い動画をダウロードします。テージからGPSモジュールを外して、再度確認します。

11月16日
直ぐにGPSモジュールを交換できるように、GPSモジュールのUSBケーブルをメータユニットまで延長しました。2台目のGPSモジュールで試走しましたが、捕捉している衛星数が4〜5個と少ない時に反応が遅くなるようです。左斜めにドライブレコーダがあり、モジュールを設置場所に問題がありそうです。

11月22日
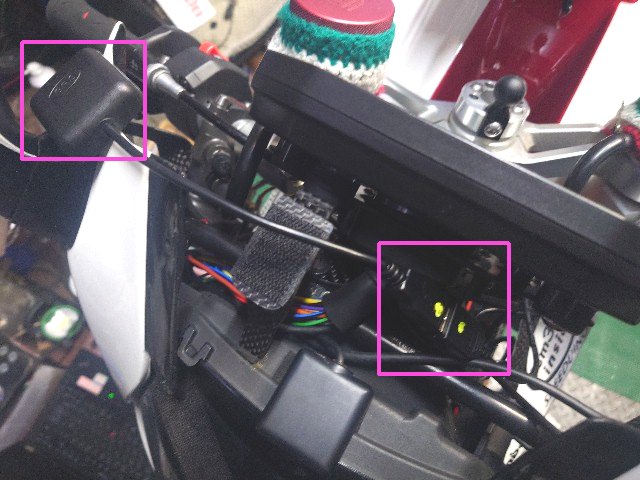
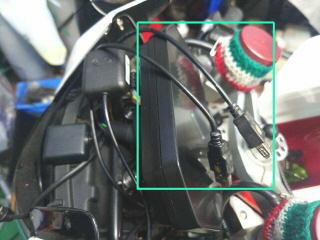
TunerStudioの周囲温度の表示が正しくないです。気温が15℃で30℃付近で高く表示されます。赤枠は燃調微調整のケースに付けたNTCセンサです。

センサを取り出して確認します。室温が15.3℃で抵抗値が4085Ωです。

センサのB定数は3988、25℃で3000Ωです。計算サイトで抵抗値を計算します。15℃の時は3772Ωです。センサが壊れているようです。

新しいセンサはモノタロウで購入済みです。

新しいセンサはお湯と氷水に付けて抵抗値を測っておきます。50℃の時1200Ω、25℃の時3000Ω、1.3℃の時9500Ω付近で抵抗値は正しいです。

11月24日
NTCセンサを交換しました。

ガレージ内の室温は約20℃です。TunerStudioの表示も20℃です。直ったと思います。


11月25日
曇りでガレージの気温が低いので、交換したNTCセンサの再確認をします。ガレージ内の室温は約10℃です。TunerStudioの表示は12℃です。良いようです。

GPSの視界をドライブレコーダが邪魔をしているようなので、GPSモジュールの設置場所をメータユニットの突っ張り棒の上に移動します。突っ張り棒は斜めなので、水平にするステーを作製します。アルミ板でオス/メス型を作製して、カーボンクロスをポリエステル樹脂で7枚積層しました。気温が低いので硬化剤を多めにしておきました。次回、離型します。

11月26日
GPSモジュールのステー作製の続きです。一日たって、樹脂が硬化したので、離型しました。


ステーの余分な部分は切り取って、電動リュータで整形しました。

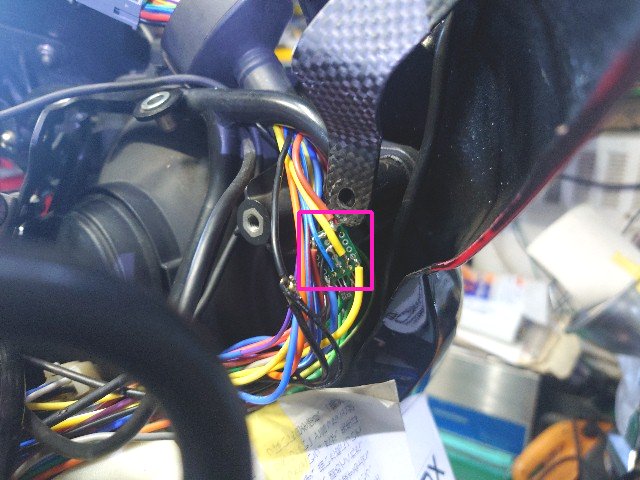
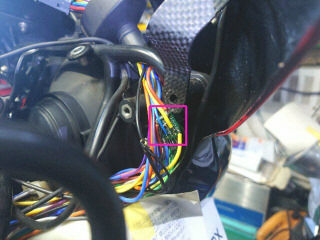
赤枠がメータユニットの振れ止めの突っ張り棒です。

ステーは両面テープで突っ張り棒に固定して、GPSモジュールはベルクロで固定しました。

12月14日
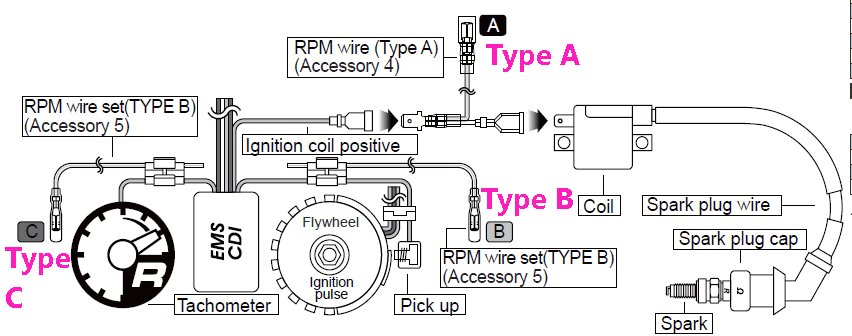
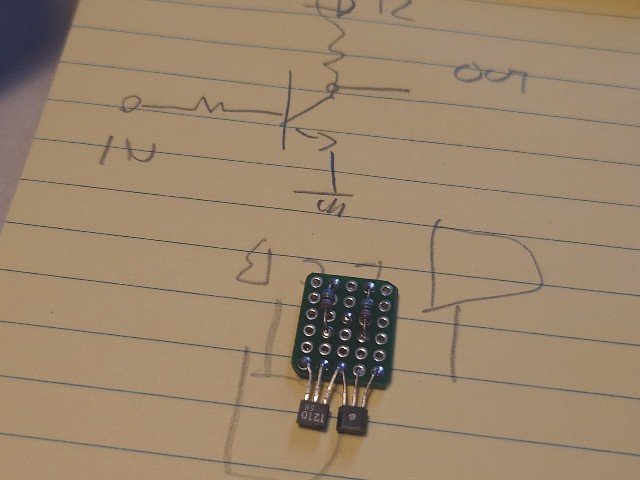
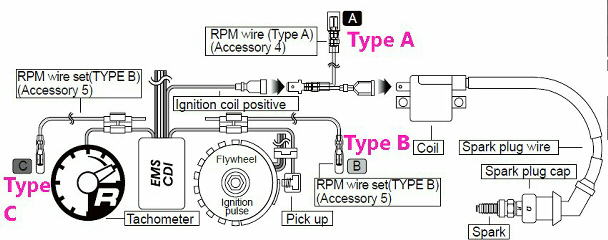
ガレージの中でエンジンをかけたところ、メータユニットの回転表示が0、正しく表示、20000回転など不安定でした。メータユニットのマニュアルには必要な具体的なレベルは書いて無いです。下のように接続する位置が指定されています。A:点火コイルの1次側、B:ピックアップセンサ信号、C:タコメータ信号の3ヶ所です。因みにC>B>Aの順で安定するとのこと。
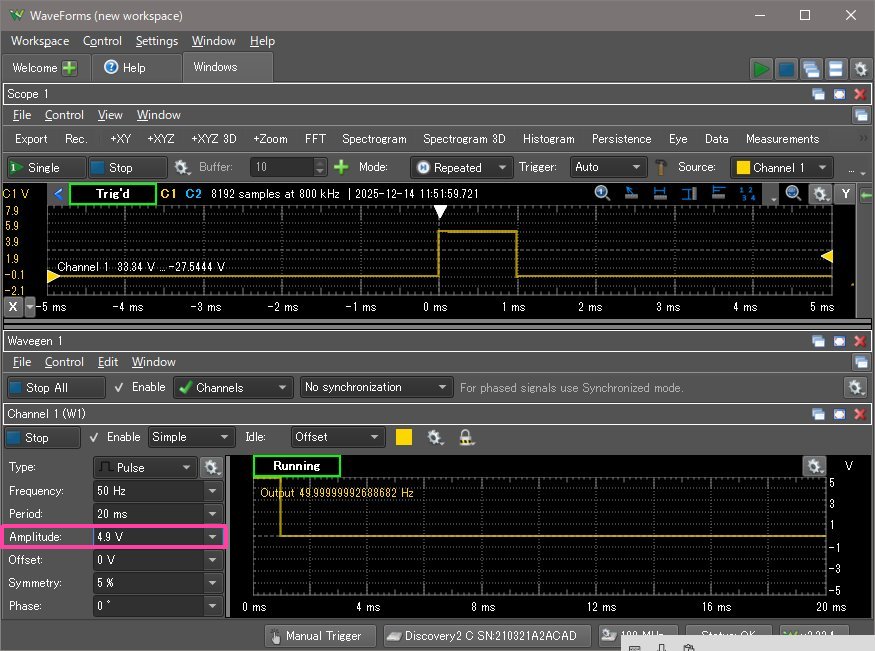
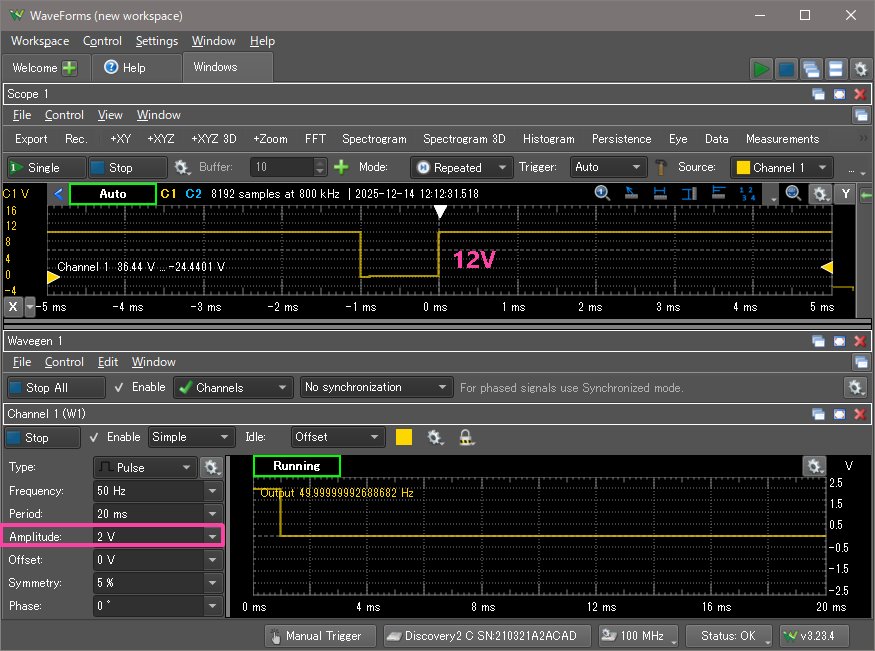
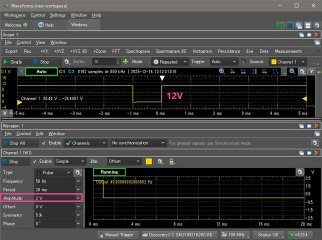
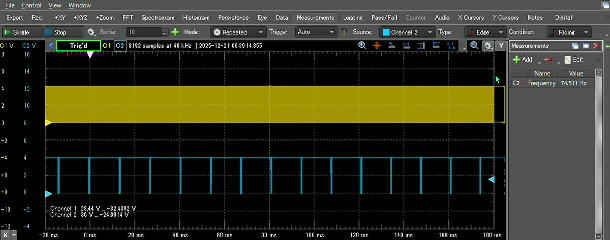
メータユニットを取り外して回転表示のRPM信号のレベルを変えて確認します。アナログディスカバリでレベル可変のパルスを作ります。初めはRPM信号を5Vにします。5Vの時は正しく回転表示しています。周波数を50Hzにしたので、50*2*60=6000回転ですが、メータユニットの表示は100Hz単位なので、低く表示されて5900回転になっています。


続いて、RPM信号の電圧を4.9Vにします。4.9Vの時は回転表示は全然表示されません。RPM信号は水平気筒の点火信号を分岐しているので、ダイレクトイ
グニッションに変更した時に、点火信号を12Vから5Vに変更したのが原因のようです。今まで5Vでギリギリで動いていたのが、気温が下がって条件が変わり、不安定になったと思いま
す。20000回転になるのは、ノイズが閾値付近にあって、影響していると思います。トランジスタでバッファを作ってレベルを上げれば解決しそうです。

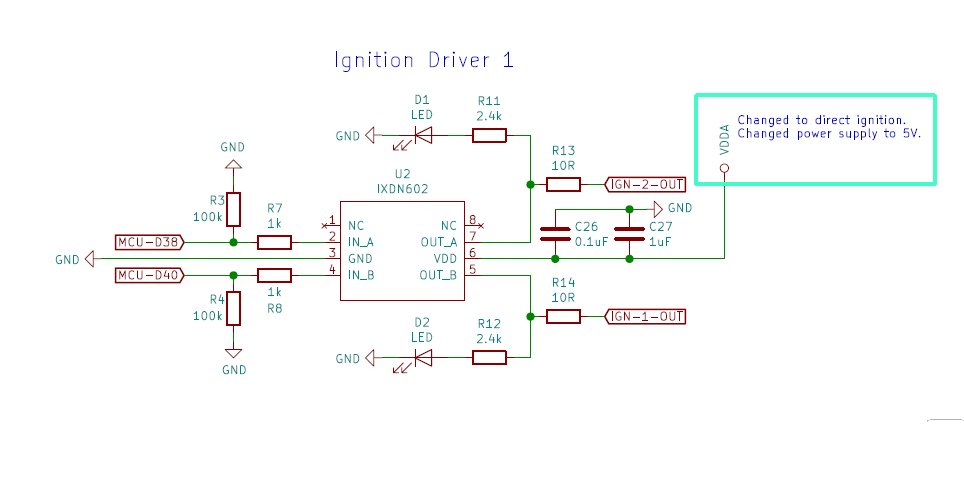
下はSpeeduinoのイグニッション駆動回路です。元々、点火コイルの1次側を直接駆動するようには設計されておらず、スマートコイル用の点火信号を12Vで出力していました。緑枠が電源で、フィットのダイレクトイグニッションコイルを使っているので、現在は5Vに接続されています。
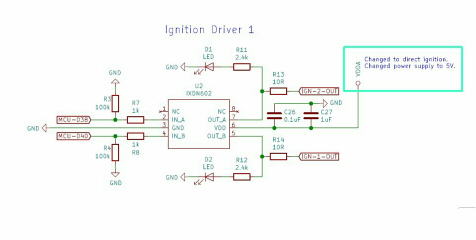
RPM信号は反転しても問題ないので、NPNデジトラを1個使ってレベル変換のバッファを作りました。既にハーネスに付いているキルスイッチ用の反転バッファ(キルスイッチが入っているとメータユニットのセキュリティインジケータが点灯する)もまとめて、1つの基板に実装しました。
RPM信号の電圧を低く、2Vにしてみます。バッファ出力は反転して12Vになっています。低い電圧でも正しく回転表示されるようになりました。
12月15日
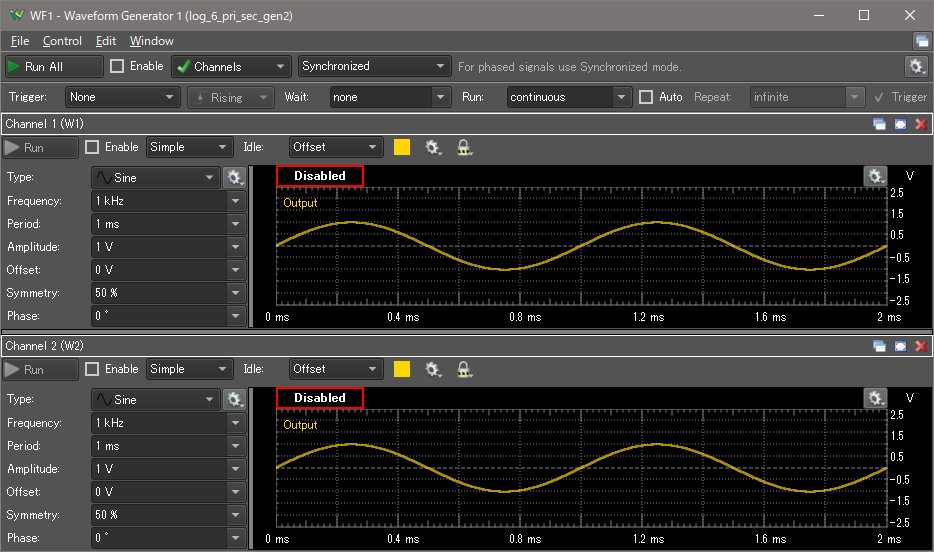
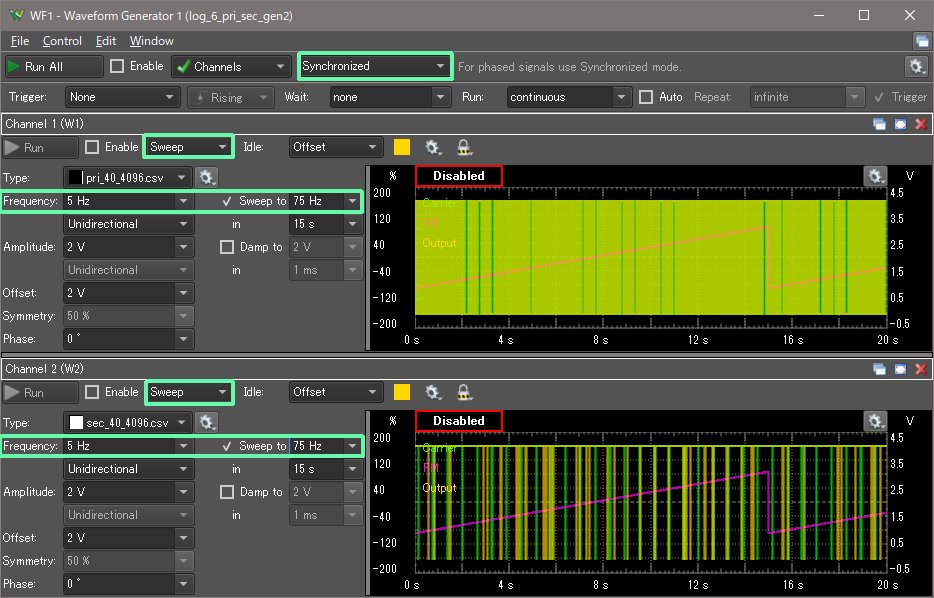
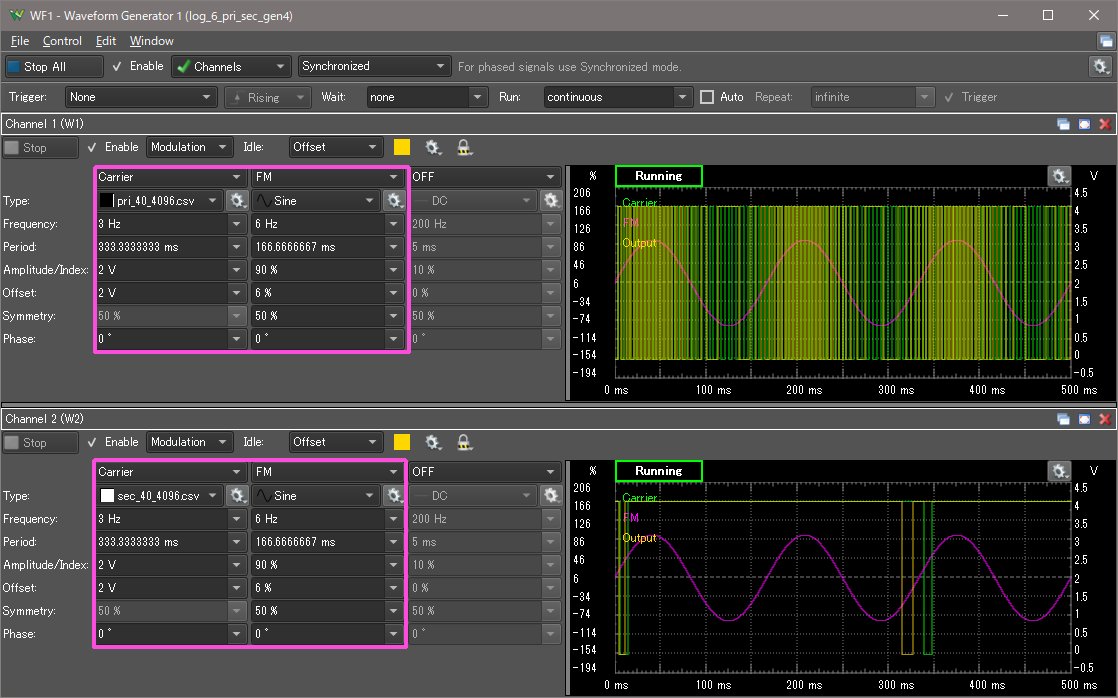
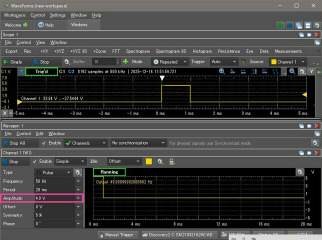
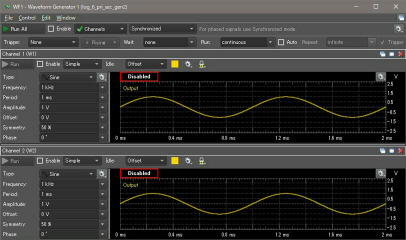
エンジンをかけないで、メータユニットの動作確認ができるようにプライマリ/セカンダリの疑似パルスをアナログディスカバリで作成します。アナログディスカバリの波形ジェネレータは2チャンネル出力できます。デフォルトは正弦波です。
出力波形はCSVファイルをインポートでき、任意波形が作れます。
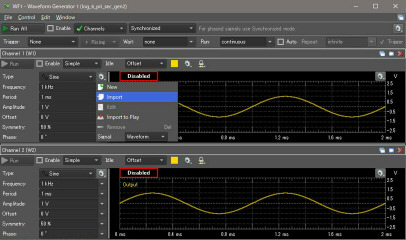
予め、プライマリとセカンダリパルスのCSVファイルを作成しておき、インポートします。デフォルトは4096ステップです。波形はセンサと同じ極性で作ります。赤外線が通過した時にLOWレベルです。その後、ヒステリシスコンパレータで反転されます。

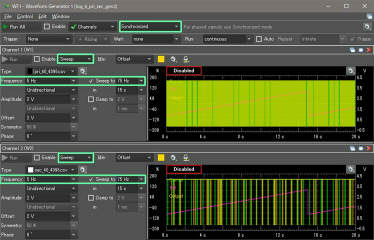
15秒間で600〜9000回転をスイープして上昇させます。2つの出力を同期させるには緑枠の設定で同期モードにして、かつスイープの条件を同一にする必要があります。一致していないとシンク・ロスの嵐になります。
エンジンエミュレータの外部入力に疑似パルスを接続します。
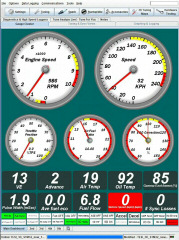
エンジンエニュミレータ経由で動作させ、TunerStudioのウインドを動画キャプチャしました。クリックすると約8.4Mバイトの動画をダウンロードします。
12月17日
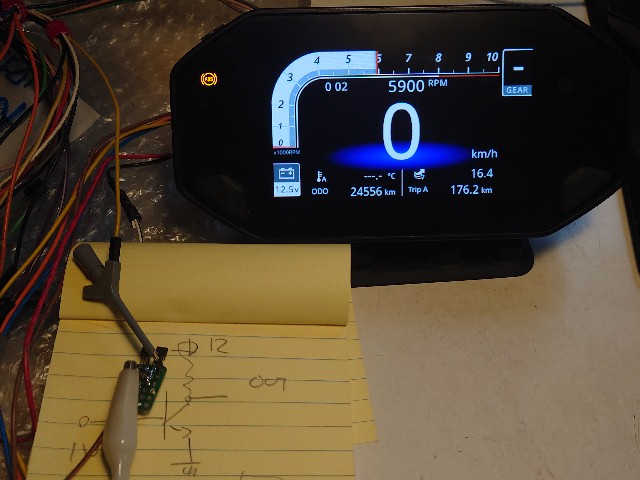
メータユニットの回転表示の続きです。デジトラのレベル変換基板を実車に取り付けました。キルスイッチの反転バッファも配線し直しました。
パルスセンサのコネクタを外して、代わりにアナログディスカバリの疑似スイープ信号を繋ぎます。

スイープ信号をスタートして確認します。エンジンは掛かっていなので、インジェクタの音しかしません。メータユニットとTunerStudioの動画を撮りました。クリックすると約3.9Mバイトの動画をダウンロードします。メータユニットは9000ー>600に直ぐに下がらないようですが、動作は良いようです。

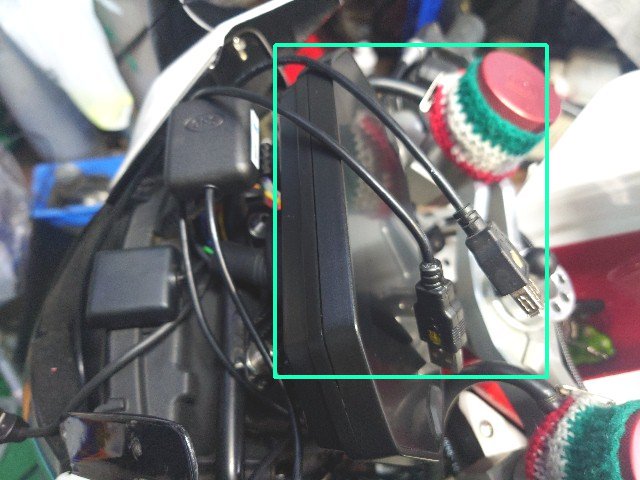
フロントスクリーンが外れているので仮止め状態のGPSモジュールのUSBケーブルの取り回しを確認します。ケーブルが長いです。後で短くします。
12月21日
USBのtypeAのオス・メスコネクタを使ってGPSモジュールのケーブルを短くしました。

以前に作成したアナログディスカバリの疑似パルス出力はスイープ動作でしたが、一瞬で
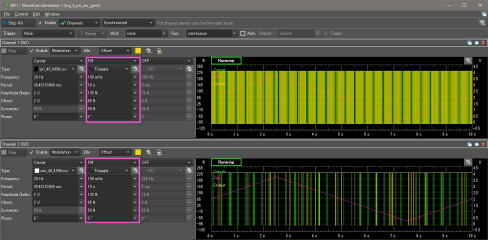
9000rpmから600rpmに落ちてしまい、これは実車では起きないです。そこで、スイープから変調モードに切り替え、三角波で周波数変調して、10秒で滑らかに上昇下降に変更してみます。赤枠の変調度(変調の振幅)とオフセットを適当に選ぶと1000rpm〜9100rpmの間を行ったり来たりできます。スイープのように周波数で指定できないので設定が少し面倒です。因みに、100%の周波数変調は周波数2倍です。
三角波の周波数変調の疑似パルスのオシロスコープのキャプチャ動画です。クリックすると約6Mバイトの動画をダウンロードします。
同じく、TunerStudioのキャプチャ動画です。クリックすると約3.9Mバイトの動画をダウンロードします。
12月24日
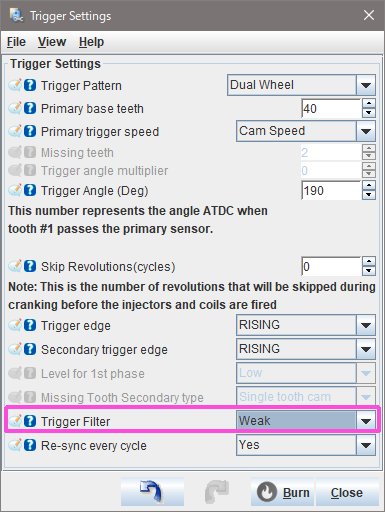
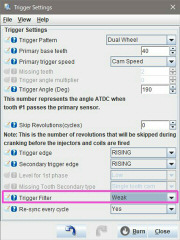
前から気になっていた、TunerStudioのトリガフィルタについ調べます。トリガセッティングのダイアログにあるトリガフィルタは無し(Off)、弱(Weak)、中(Medium)、強(Aggresive)の4つの設定があり、ダイアログ中のヘルプには次の文言があります。”トリ
ガーフィルターアルゴリズムの調整。設定を強くするほどノイズが除去されますが、実際の測定値がフィルタリングされてしまう可能性が高くなります。「中」
はほとんどの設定で問題ありません。他のオプションが機能しない場合にのみ、「アグレッシブ」を選択してください。これは強くすると、本来のパルスをノイ
ズと間違えるということを言っています”。と、ヘルプ中には定量的な事が書いてないです。
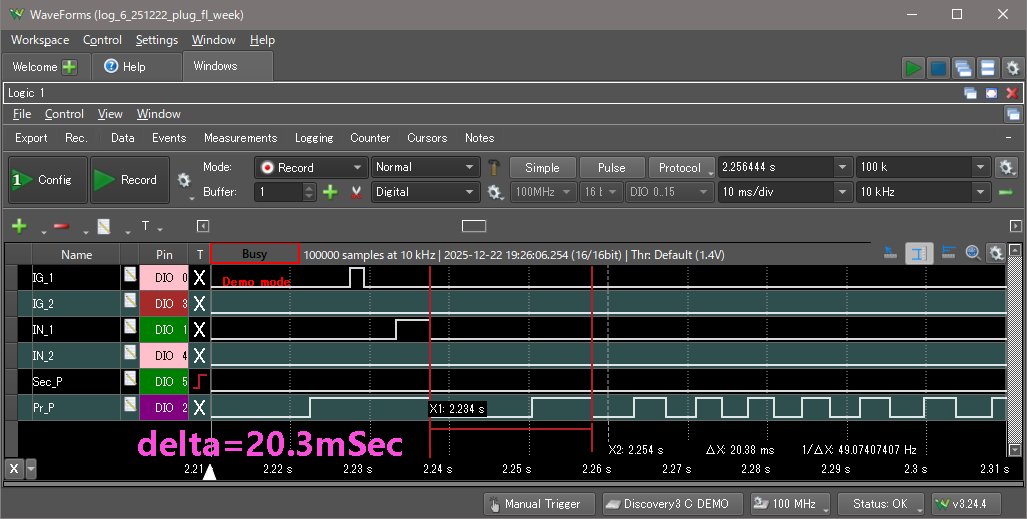
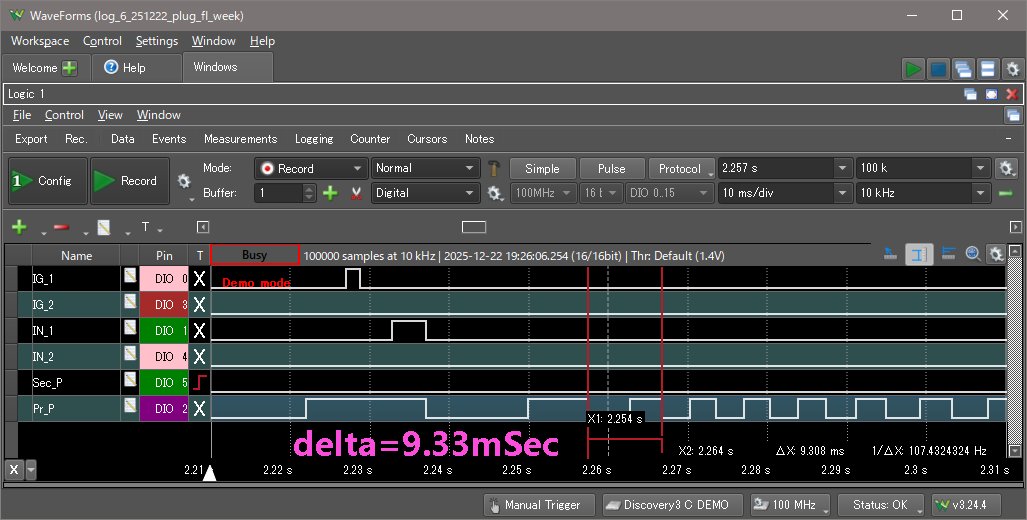
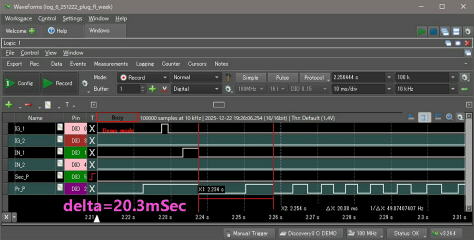
誤ってノイズ判定される可能性のあるのは回転変化の激しいクランキング時です。室温が10℃前後の冬のガレージでクランキングした時にプライマリパルスの変化が大きい所を探します。上死点から解放された時の変化が大きいです。前側は約20mSecです。
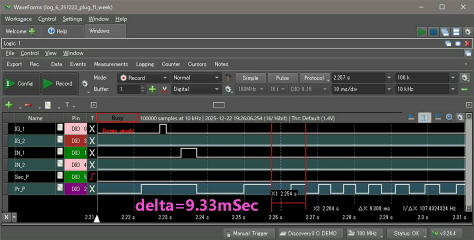
後ろ側は約9.3mSecです。前からは約1/2短くなっています。因みに、全体の最大と最小では1/4くらい短くなります。
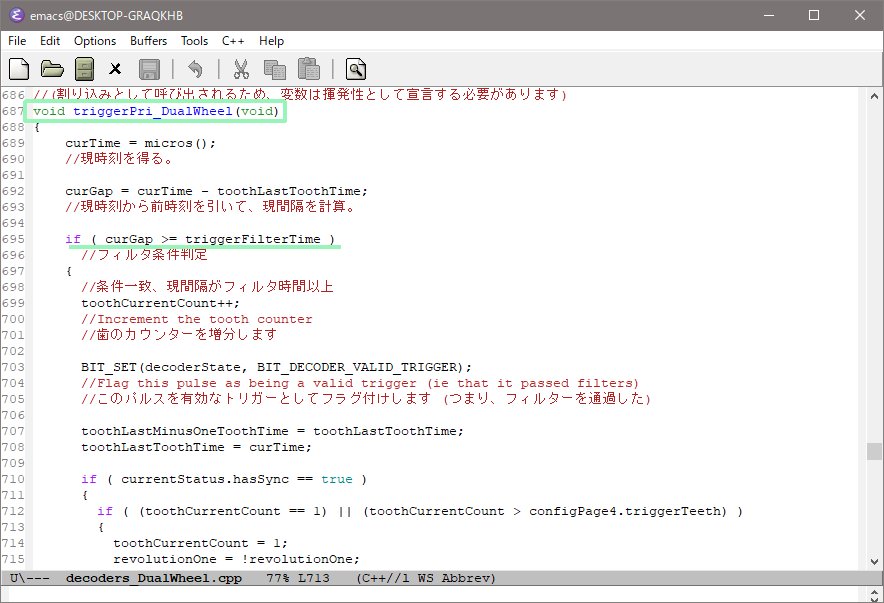
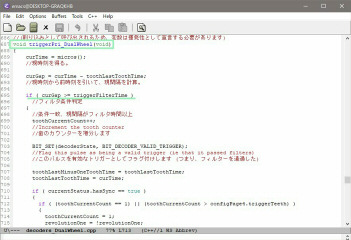
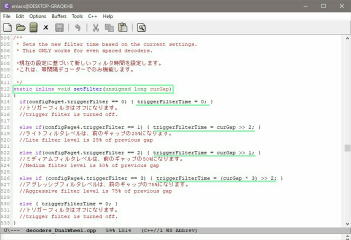
decoders.cpp内のプライマリパルス処理関数、triggerPri_DualWheel関数を確認したところ、1つ前の処理とのギャップ(経過時間
)がグローバル変数に代入され、ダイアログで指定されたフィルタ値(無し=0、弱=25%、中=50%、強=75%)によって計算された時間と比較し、短くなった時にノイズ判定して、プライマリパルス処理を無し(スキップ)にする処理
が行われます。フィルタ値はsetFilter関数でプライマリパルス処理毎に計算されます。例として150−>100、200−>100(冬のクランキングに相当する変化)、300−>100にギャップが短くなった時のフィルタの動作を確認します。
例:現100 前150
Off:100 >= 0 通過
Weak:100 >= 38 通過
Med: 100 >= 75 通過
Agg: 100 >= 113 阻止
例:現100 前200(1/2短い場合、冬のクランキングに相当する変化)
Off:100 >= 0 通過
Weak:100 >= 50 通過
Med: 100 >= 100 阻止(中の設定でプライマリパルスがノイズ判定される)
Agg: 100 >= 150 阻止
例:現100 前300
Off:100 >= 0 通過
Weak:100 >= 75 通過
Med: 100 >= 150 阻止
Agg: 100 >= 225 阻止
クランキング時に圧縮の影響で回転変化の大きいLツインでは中の設定以上でプライマリパルスがノイズ判定されることが分かります。トリガフィルタは弱、または無しの設定にする必要があります。フォ
トインタラプタとヒステリシスコンパレータの組み合わせはノイズに強そうなので、トリガフィルタは無しでも問題なさそうです。
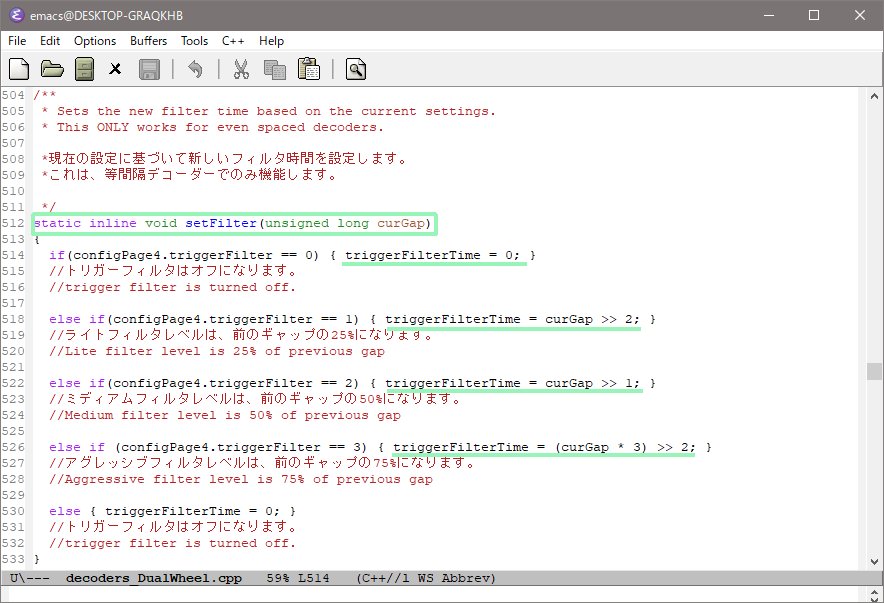
setFilter関数は下のように、無し=0、ギャップを右にシフトして弱=25%、中=50%、強=75%のフィルタ値を計算します。
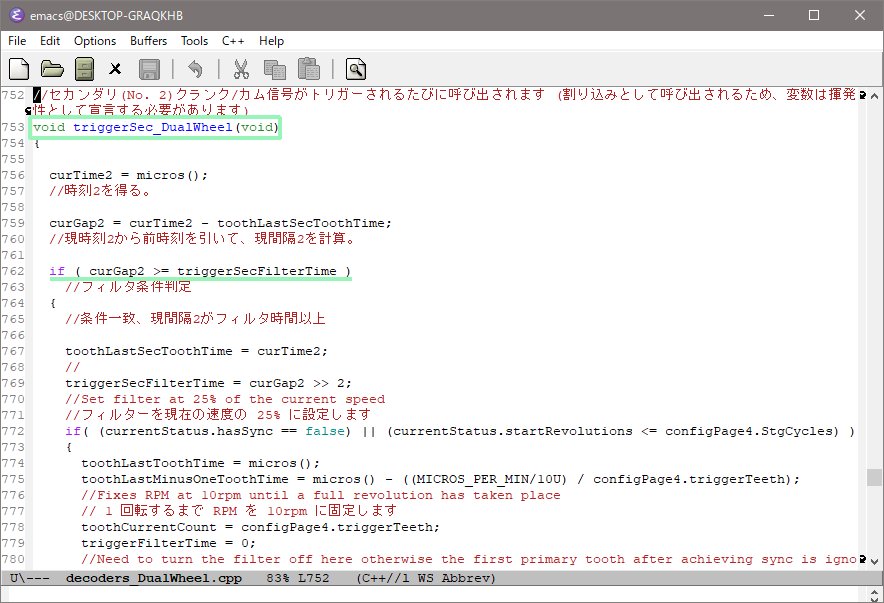
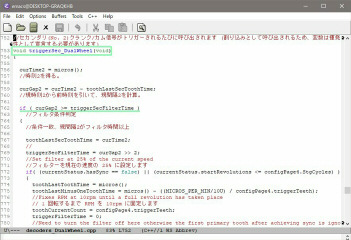
セカンダリパルスの処理の中にもフィルタ処理がありました。下はdecoders.cpp内のtriggerSec_DualWheel関数です。セカンダリパルスのフィルタは25%で一定です。これはプライマリパルスの弱と同様なので、問題無いです。
12月25日
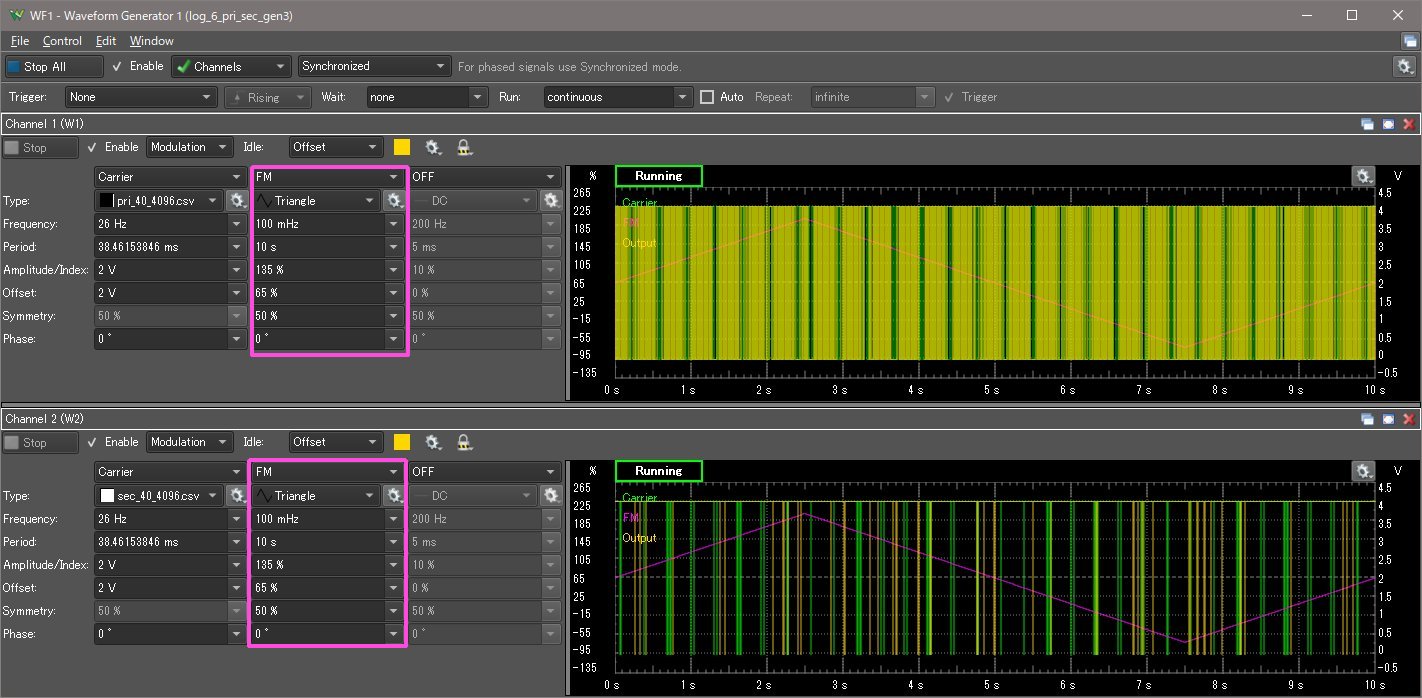
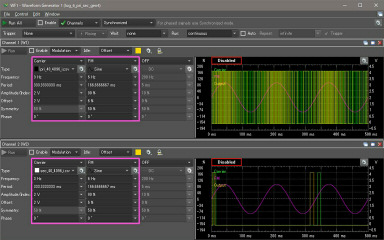
TunerStudioのトリガフィルタの続きです。任意波形発生で作るプライマリ、セカンダリ疑似パル
スの出力周波数より、周波数変調の周波数を高くすると、圧縮で回転が遅くなったり、早くなったりするのと同じようなタイミングを作ることができます。キャリアを3Hz、周波数変調の周波数を6Hzに設定し、周波数変調の振幅とオフセットを適当に選んで、隣と
のギャップが2倍以上になるように、クランキングに似せてみます。赤枠のようにプライマリ、セカンダリパルスとも同じ条件にしないとシンク・ロスが発生します。
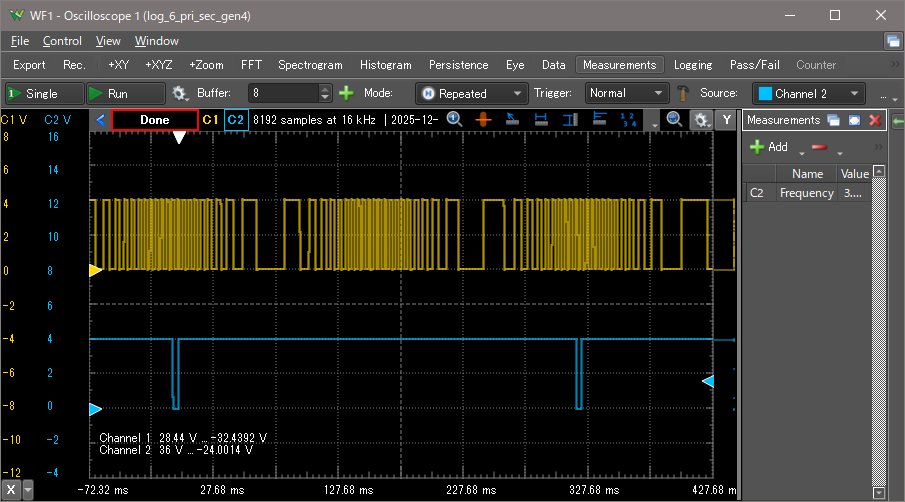
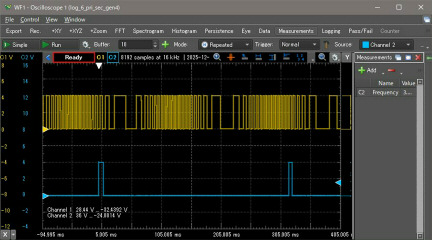
プライマリとセカンダリパルスのオシロスコープ波形です。キャリアの2倍の周波数変調なので、セカンダリパルス間に2回の周波数変化が起きています。
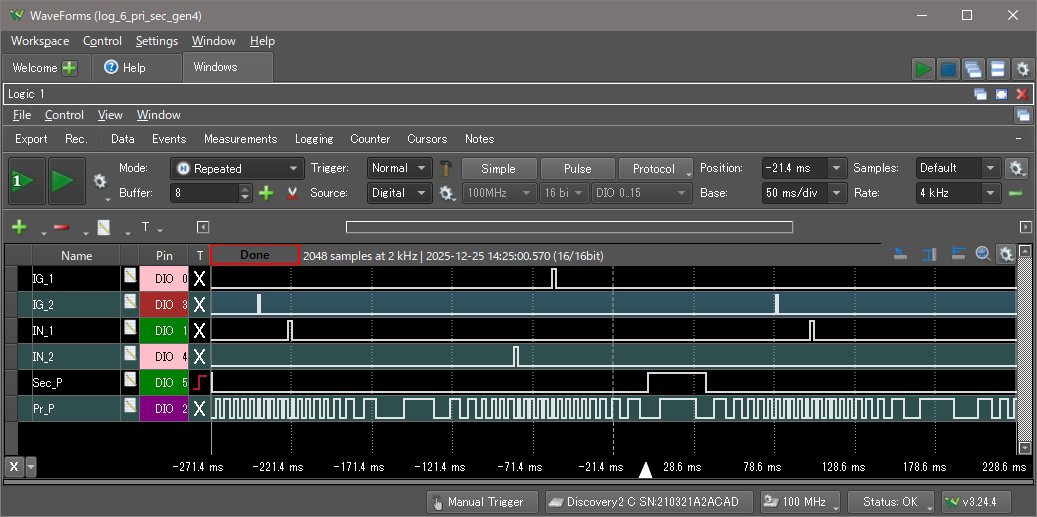
Speeduinoから出力される、デバッグ用ロジックアナライザの波形です。プライマリ、セカンダリパルスと点火x2、噴射x2の合計6個の波形がモニタできます。
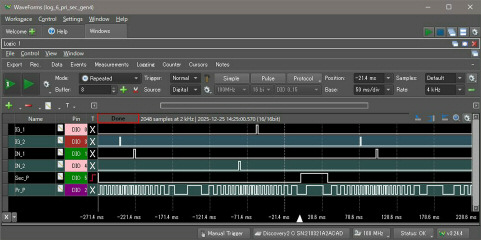
TunerStudioの画面をキャプチャしました。トリガフィルタを中に設定すると、右下の赤枠のシン・クロスが発生しました。プライマリパルスの周波数が2倍以上変動しているので、プライマリパルスをノイズと間違えているためと思います。因みに、左隣の車速はデバッグ出力している、シン・クロスが発生した時のプライマリパルスカウンタ値です。クリックすると5.3Mバイトの動画をダウンロードします。
12月27日
ヤフーオークションにムルティストラーダ1100のワンウェイクラッチが出ていたので入札しました。競らないで、8000円ほどで落札できました。

到着したので早速検品しました。2007〜モデルなので、テージと同じ部品です。ワンウェイクラッチの接触面は少しスジがついていますが、大丈夫そうです。

ジェネレータと中間ギアやフライホイールの固定ナット、ワッシャ等も付属していました。

12月28日
ガレージ内でエンジンをかけて、先日組み込んだRPM信号のレベル変換の動作を実エンジンで確認しました。動作良好です。暖機中なのでアイドリングは2000rpmくらいになっています。クリックすると約2.8Mバイトの動画をダウンロードします。

12月30日
11月の末にステーを作って移動したGPSモジュールの動作確認をします。近所を30分くらい走りました。GPSの速度表示は正しく表示されています。現在、進角制御のアイドル制御はOFFですが、気温が低いためかちょっと、アイドリングが低くて1000rpmくらいです。今年の走り収めです。